

Low velocity autonomous underwater vehicle (AUV) sailing control method based on contra-rotating propeller adding fin and rudder
A control method and technology of counter-rotating propellers, applied in three-dimensional position/channel control, adaptive control, general control system, etc., can solve problems such as difficult AUV navigation, poor maneuvering control ability, weak ability to resist external interference, etc., to achieve The effect of small calculation, convenient operation and simple logic
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] Contra-rotating propeller plus fin rudder AUV, the stern of the AUV is equipped with contra-rotating propellers and horizontal rudders and vertical rudders. The main feature of the counter-rotating propeller is its high propulsion efficiency, which can reliably perform the intended mission. It is achieved through the following technical solutions:
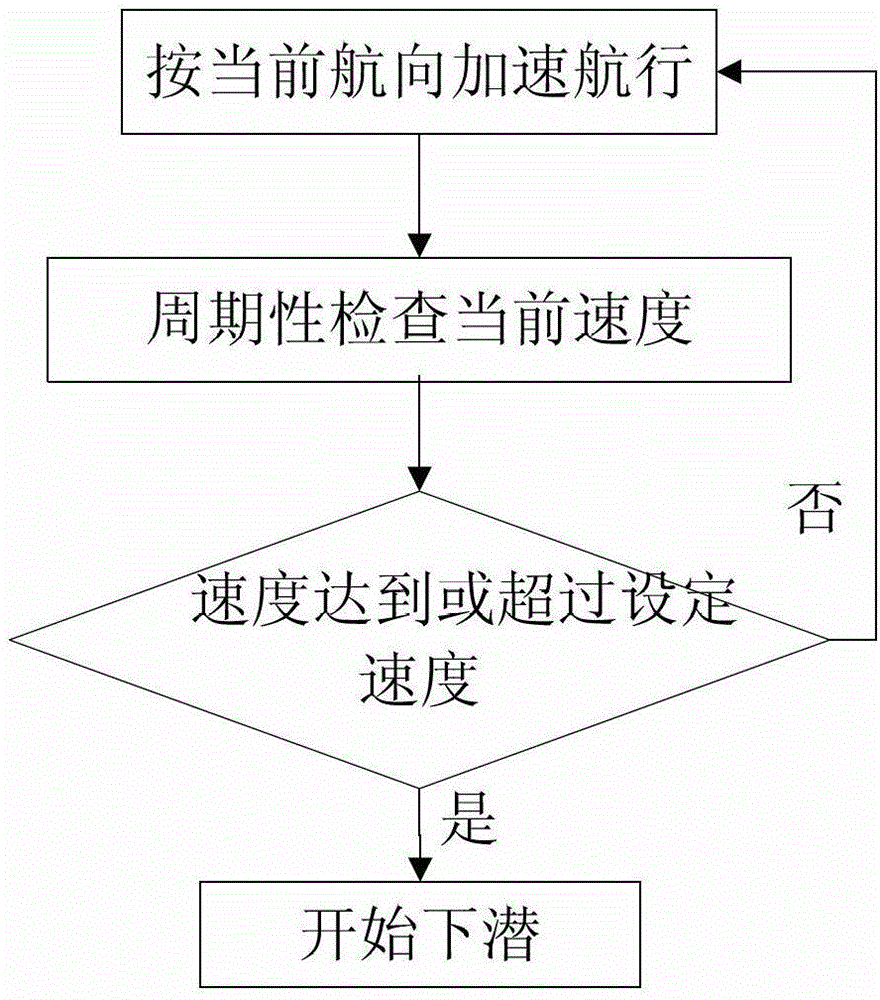
[0028] like figure 1 Shown is the flow chart of the dive program. First, accelerate the navigation according to the current heading, and periodically check the current speed. If the current speed reaches or exceeds the set speed value, then start diving, otherwise continue to accelerate the navigation according to the current heading.
[0029] In order to enable the AUV to dive reliably, it is necessary to maintain a certain relative speed between the AUV and the seawater before diving; secondly, to avoid losing control of the attitude during the dive; at the same time, the carrier’s pitch angle and forward speed should be ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More