

QP unified and coordinated motion describing and programming method for movable manipulator
A technology for moving manipulators and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as unmovable platform and manipulator coordination control, and achieve the effect of avoiding extra workload and cumbersome processes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
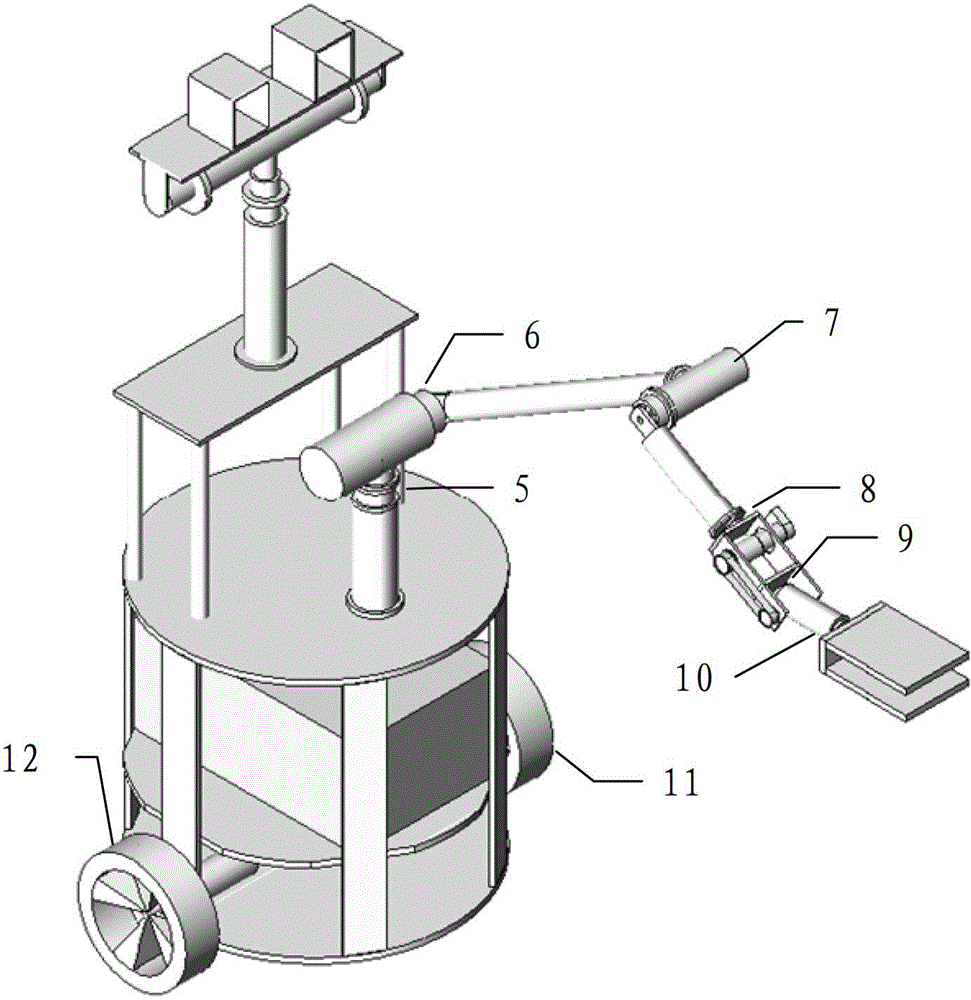
[0019] figure 2 It is shown that the mobile mechanical arm realizing the present invention is a three-dimensional two-wheel driven mobile mechanical arm. The mechanical arm is composed of six connecting rods, which are connected by joints 5, 6, 7, 8, 9 and 10. The mobile platform comprises two drive wheels: a left drive wheel 11 and a right drive wheel 12 . In the patent example of the present invention, the initial angle of the joints 5-10 of the manipulator is set to [0, π / 3, π / 6, π, π / 2, 0] T Radian, the initial angle of left drive wheel 11 and right drive wheel 12 is set to [0,0] T Radians, that is, q(0)=[0,0,0,π / 3,π / 6,π,π / 2,0] T , the upper and lower limits of the joint angle are set to q ± =[±∞,±∞,±0.5236,±2.3562,±6.2832,±6.2832,±6.2832,±6.2832] T Radian, the upper and lower limits of the combined speed are set to q · ± = [ ± 30.0 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More