

Swing-by probe autonomous celestial navigation method based on adaptive scale change
A technology of celestial navigation and scale change, which can be applied to combined navigators and other directions, and can solve problems such as large amount of calculation and low navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
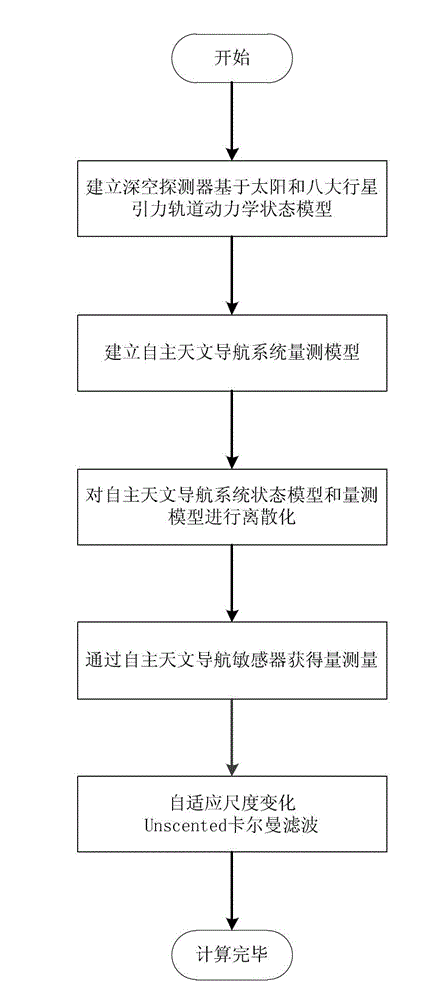
[0088] Such as figure 1 As shown, the leveraged celestial bodies involved in the aforementioned technical solutions can be planets in the solar system such as Mars, Venus, Jupiter, Saturn, etc., and Mars is used as an example below to illustrate the specific implementation process of the present invention:
[0089] 1. Establish a state model of deep space probes based on the gravitational orbital dynamics of the sun and eight planets
[0090] First initialize the position and velocity, set X'=[x' y' z' v x ' v y ' v z '] T is the state vector in the center of fire inertial coordinate system, x′,y′,z′,v′ x ,v' y ,v′ z are the three-axis position and velocity of the detector in the inertial coordinate system of the center of fire, respectively. The above variables are functions related to t. According to the orbit design of the detector, the initial value of the position and velocity of the detector is X′(0) .
[0091] In the inertial coordinate system of the center of f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More