

Moving-object prediction device, virtual-mobile-object prediction device, program, mobile-object prediction method, and virtual-mobile-object prediction method
A technology for predicting devices and moving objects, applied to program modules and moving object prediction methods, can solve the problems of being unable to predict the future position of moving objects with high precision, unable to predict the future position of moving objects, and having no physical meaning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
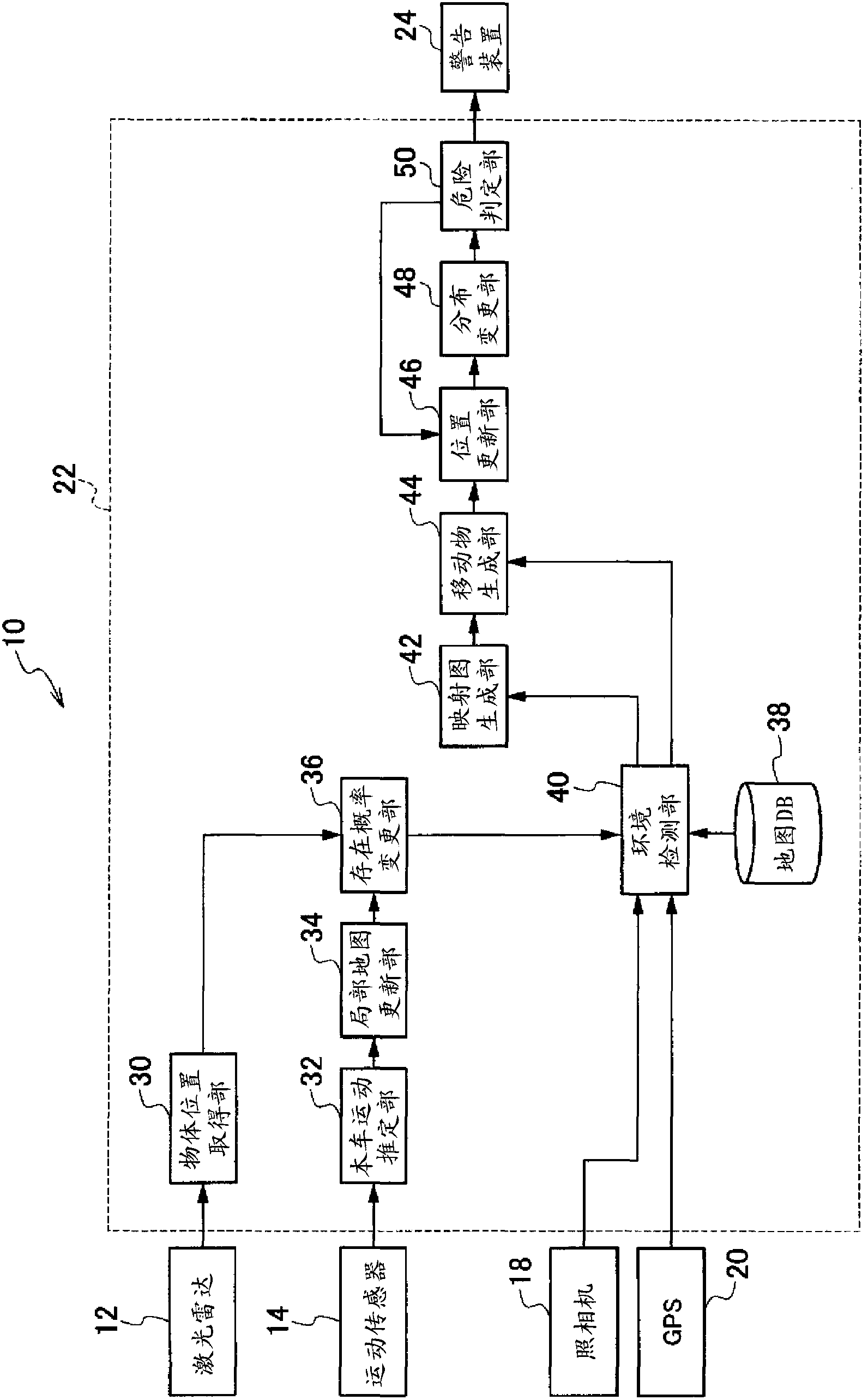
[0072] Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings. In addition, in this embodiment, a case where the present invention is applied to a collision risk determination device mounted on a vehicle will be described as an example.
[0073] like figure 1 As shown, the collision risk determination device 10 according to the first embodiment includes: the laser radar 12 scans one-dimensionally (horizontally) while irradiating laser light toward the front of the own vehicle as the determination target range, and detects the laser light by reflection of the laser light. The two-dimensional position of the irradiated object; the motion sensor 14, the motion sensor 14 detects the motion state of the vehicle; the camera 18, the camera 18 photographs the front of the vehicle; the position of the host vehicle; and a computer 22 that generates local map information recording the presence of a stationary object ahead as seen fro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More