

Jumping mechanism with adjustable jump-up angle for wheeled hopping robot
A robot and angle technology, applied in the field of robotics, can solve the problems of complex bouncing mechanism, low bouncing efficiency and poor flexibility of jumping robots, so as to expand the overall range of activities, improve bouncing effect, and optimize bouncing performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
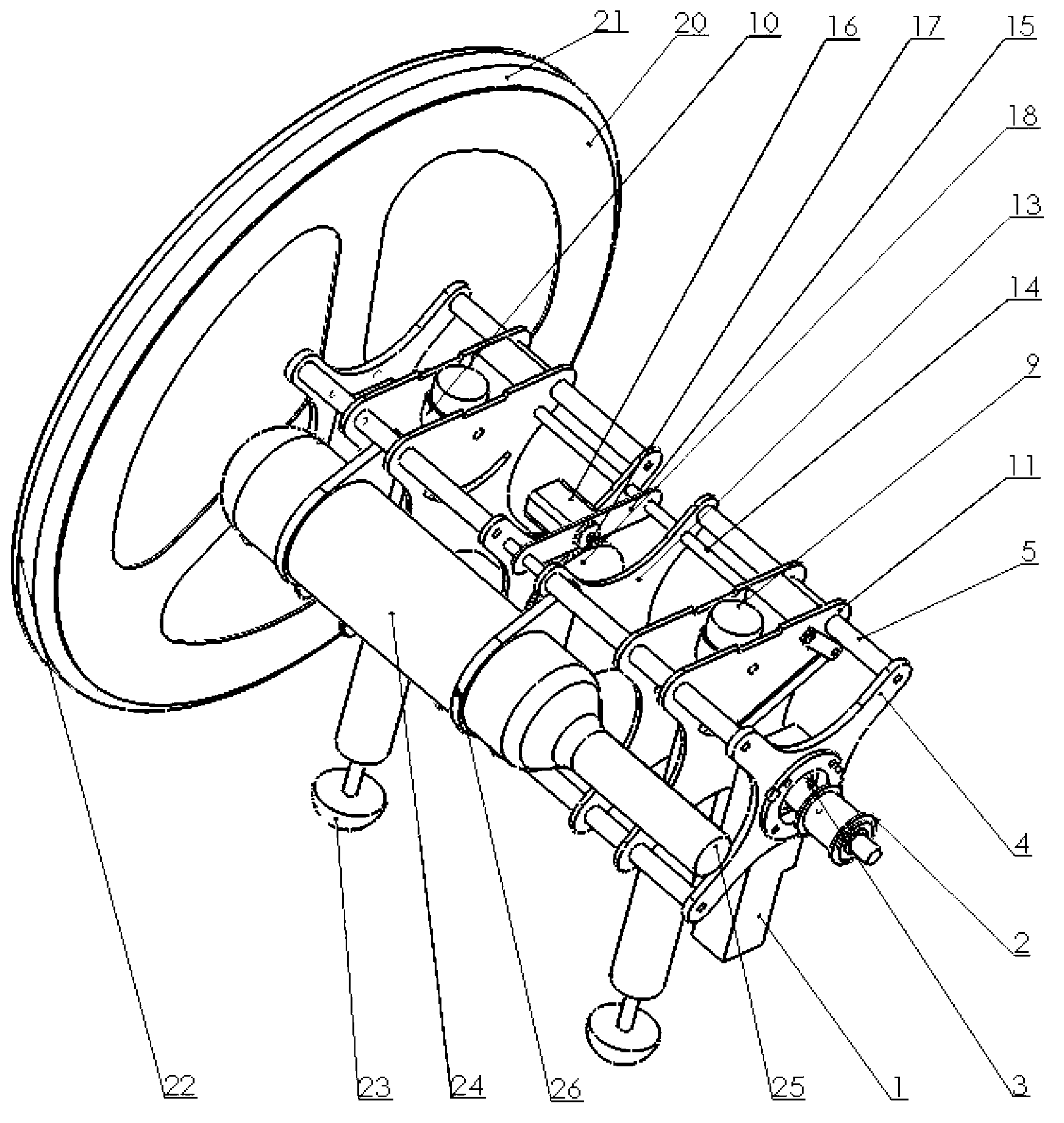
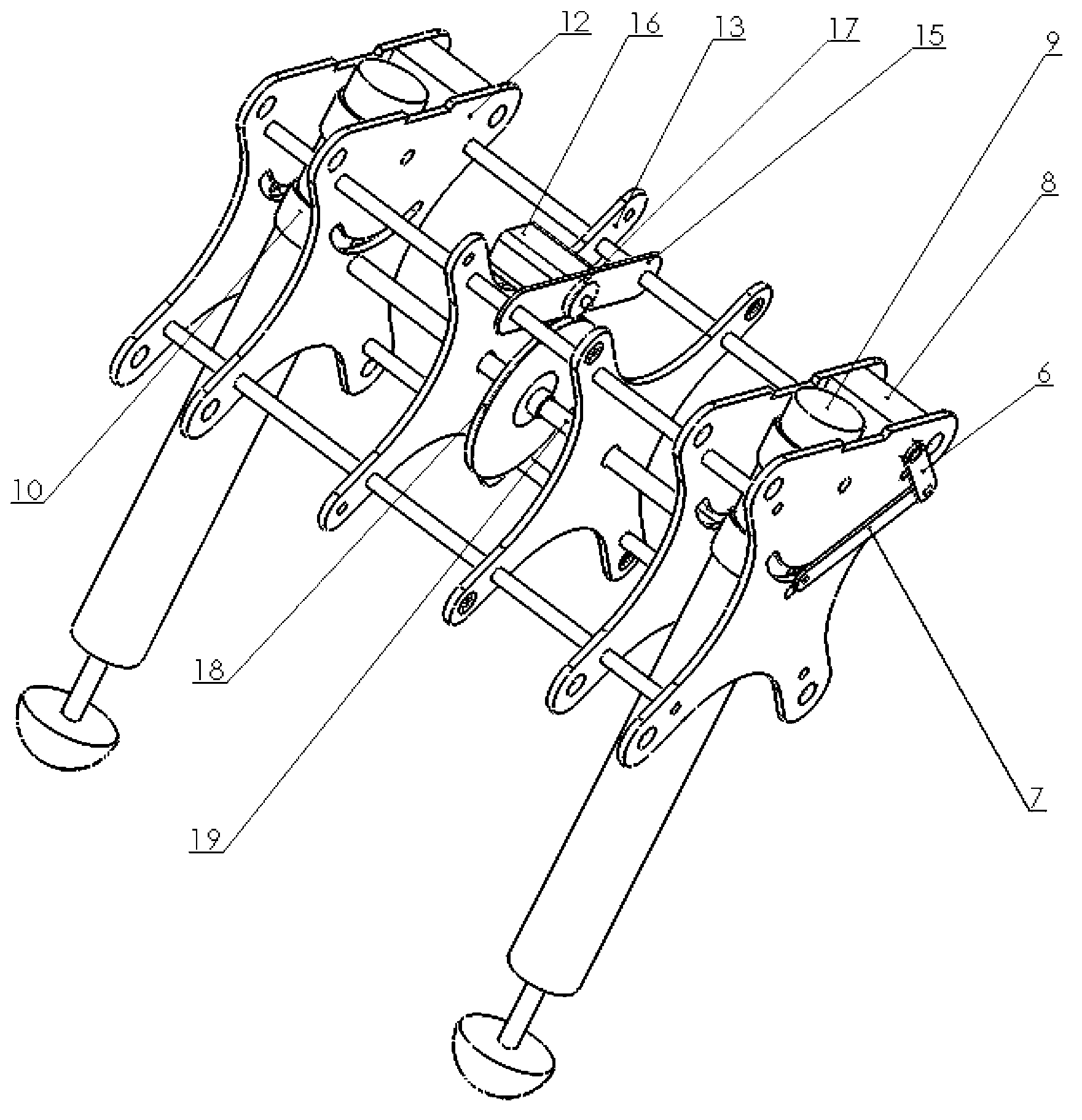
[0040] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0041] refer to figure 1 , 2 , the bouncing mechanism of the wheeled jumping robot with adjustable take-off angle has two cylinder fixed frames inside. 10 is fixed between the fixed frame inner plate 12 and the fixed frame outer plate 11, and the bottom of the cylinder piston rod is equipped with a cylinder foot pad 23; the two cylinder fixed frames all have the fixed frame optical axis to pass through; and are all connected to the fixed frame optical axis 14 are fixedly connected, and the two fixed frame inner plates 12 are opposite, and the two fixed frame outer plates 11 are all located on the outside; the four fixed frame optical axes 14 respectively pass through the round holes on the four corners of the fixed frame inner plates 12, and the fixed frame light The two ends of the shaft 14 are respectively fixed on the outer plate 11 of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More