Method and device for controlling stepping motor self-learning
A stepper motor, self-learning technology, applied in mechanical equipment, electrical control, engine control and other directions, can solve the problem of ECU unable to identify the number of steps of the stepper motor, affecting the service life of the stepper motor, affecting the idle speed control, etc., to prevent The effect of rebounding, prolonging service life and improving quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0057] This embodiment provides a method for controlling the self-learning of stepper motors, see figure 1 , the method flow provided by this embodiment is specifically as follows:
[0058] 101: Determine the first number of steps and out-of-step protection value of this self-learning, and set the total number of steps of this self-learning according to the determined first number of steps and out-of-step protection value of this self-learning;
[0059] 102: Control the current self-learning of the stepping motor according to the set total steps of this self-learning.
[0060] The method provided by the embodiment of the present invention controls the self-learning by setting the total number of steps of this self-learning with the first step number and the out-of-step protection value, so as to ensure that the stepping motor walks to the closed position when the self-learning ends, Reduce the occurrence of stepping motor out of step and improve the quality of idle speed cont...
Embodiment 2
[0062] Embodiment two
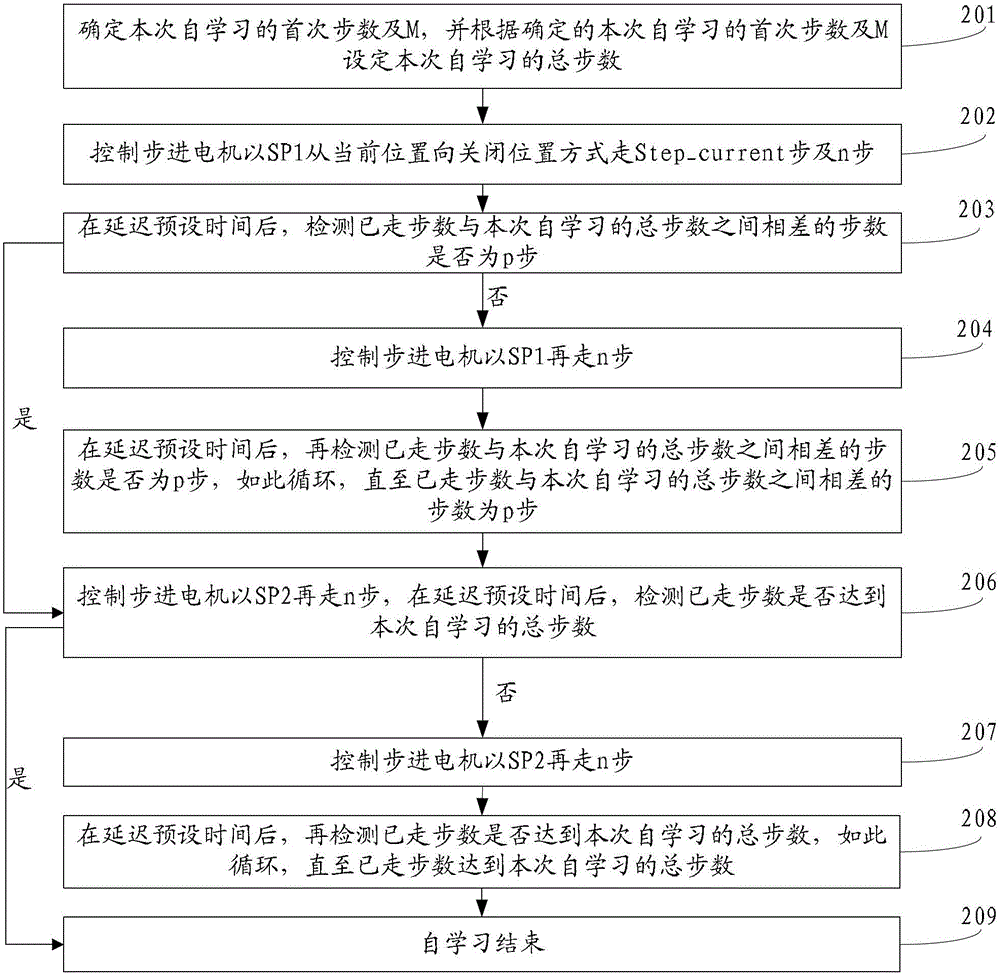
[0063] The embodiment of the present invention provides a method for controlling the self-learning of the stepping motor. In order to facilitate understanding, in combination with the content of the first embodiment above, the number of steps set before the ignition key is turned off is 60, and M (out-of-step protection value) is 30, SP1 (first speed) is 5ms / step, n (first preset step) is 3, p (second preset step) is 9, SP2 (second speed) is 30ms / step as an example, this implementation The method provided by the example is illustrated in detail. see figure 2 , the method flow provided by this embodiment includes:
[0064] 201: Determine the first steps and M of this self-study, and set the total number of steps of this self-study according to the determined first steps and M of this self-study;
[0065] In the specific implementation process, the determination method of Step_current (the first step number of this self-learning) is: judge whether the...
Embodiment 3
[0118] The embodiment of the present invention provides a device for controlling the self-learning of stepper motors, see Figure 4 , the device consists of:
[0119] The first determination module 401 is used to determine the first steps of this self-study;
[0120] The second determination module 402 is used to determine the out-of-synchronization protection value of this self-learning;
[0121] The setting module 403 is used to set the total number of steps of this self-learning according to the first steps of this self-learning determined by the first determining module 401 and the out-of-synchronization protection value of this self-learning determined by the second determining module 402 ;
[0122] The first control module 404 is configured to control the current self-learning of the stepping motor according to the total number of steps of the current self-learning set by the setting module 403 .
[0123] Further, the first control module 404 is used to control the st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com