Novel multi-degree-of-freedom robot grippers
A robot gripper and degree of freedom technology, applied in the field of robotics, can solve the problems that the application level is difficult to exert its due advantages, the robot and its gripper movements are not flexible enough, etc., and achieve good practical effects, accurate mechanical movements, and work flexibility. high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
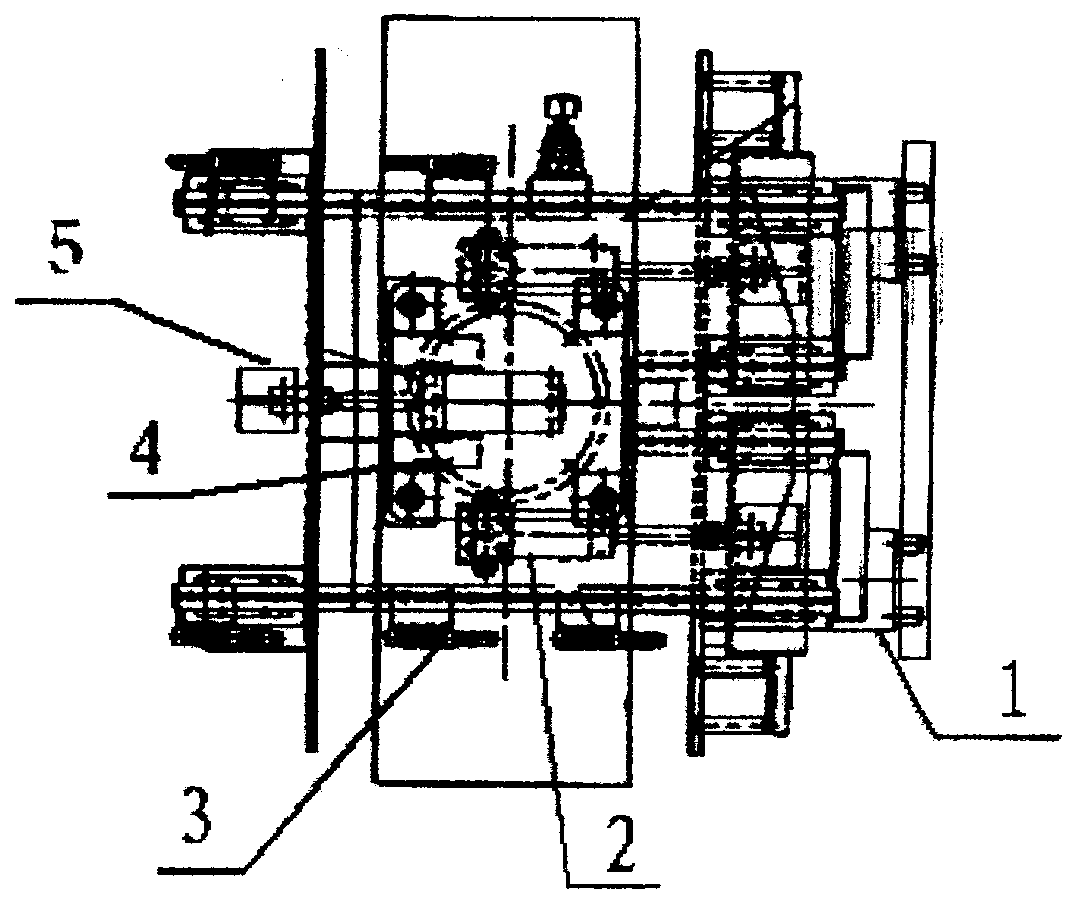
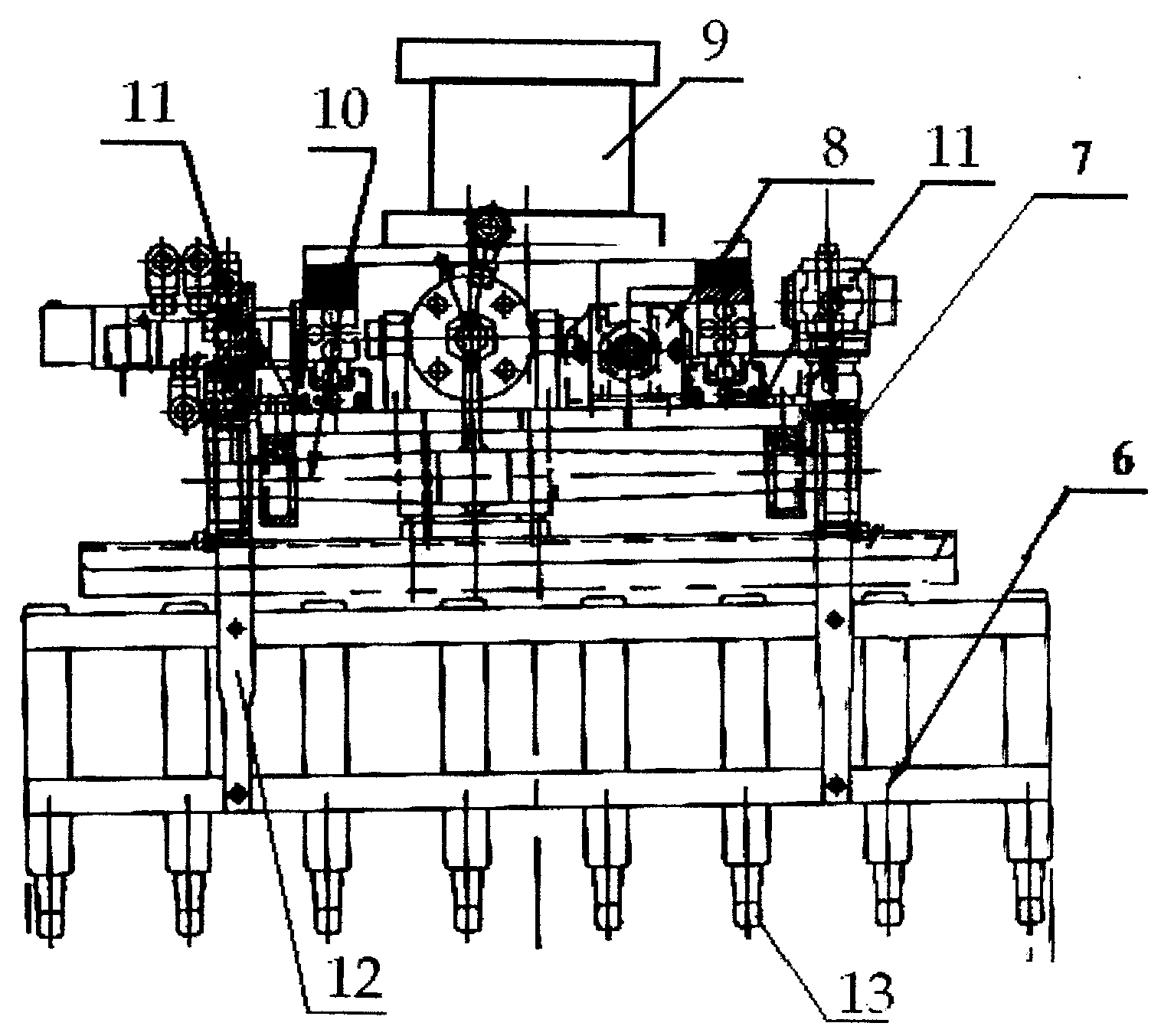
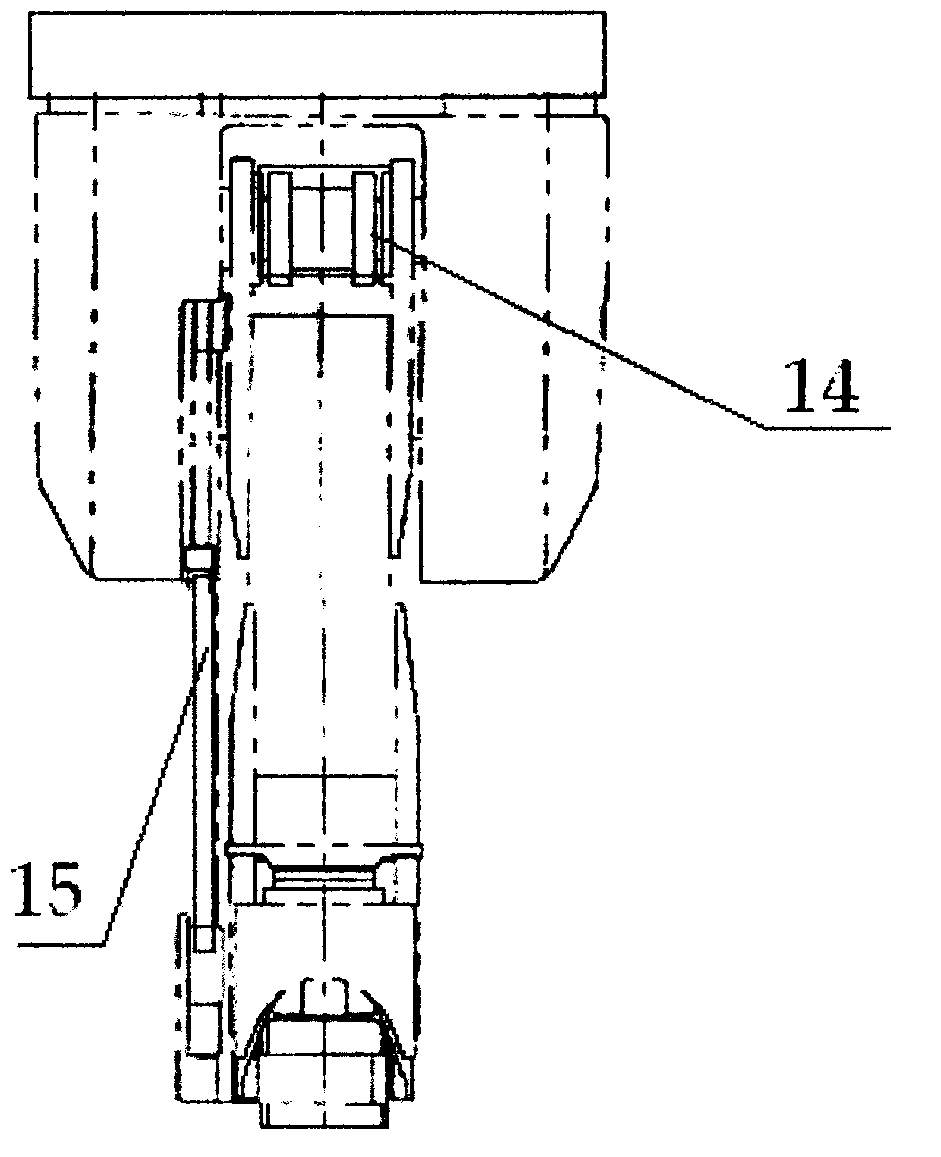
[0018] see Figure 1 to Figure 3 As shown, the present invention includes a body, two gripper mechanisms 1, left and right cylinders 2, a linkage motor 3 and a rotating mechanism 4, the body is rectangular, and a slideway is provided on the long side of the rectangle, and the gripper mechanism 1 is set on the slideway through a mechanical mechanism, on which an arm motor 5 is arranged, and the gripper mechanism 1 is provided with a gripper beam 6 and two gripper arms 12, and the gripper beam 6 is connected with a rectangular The long sides are parallel, and the gripper mechanism 1 can move on the slideway under the drive of the machine arm motor. The left and right cylinders 2 are arranged near the short sides of the rectangle, and one end of the left and right cylinders 2 is connected with the gripper mechanism 1. When the left and right cylinders 2 are activated, the two grip mechanisms 1 of the present invention can be clamped or loosened under the drive of the cylinders. ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap