

Following auxiliary control system based on inter-vehicle cooperation
An auxiliary control system and auxiliary control technology, applied in the field of car-following auxiliary control systems, can solve the problems of not considering the driver's psychological state, the difficulty of the model, and the difficulty of matching the maximum traffic volume, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
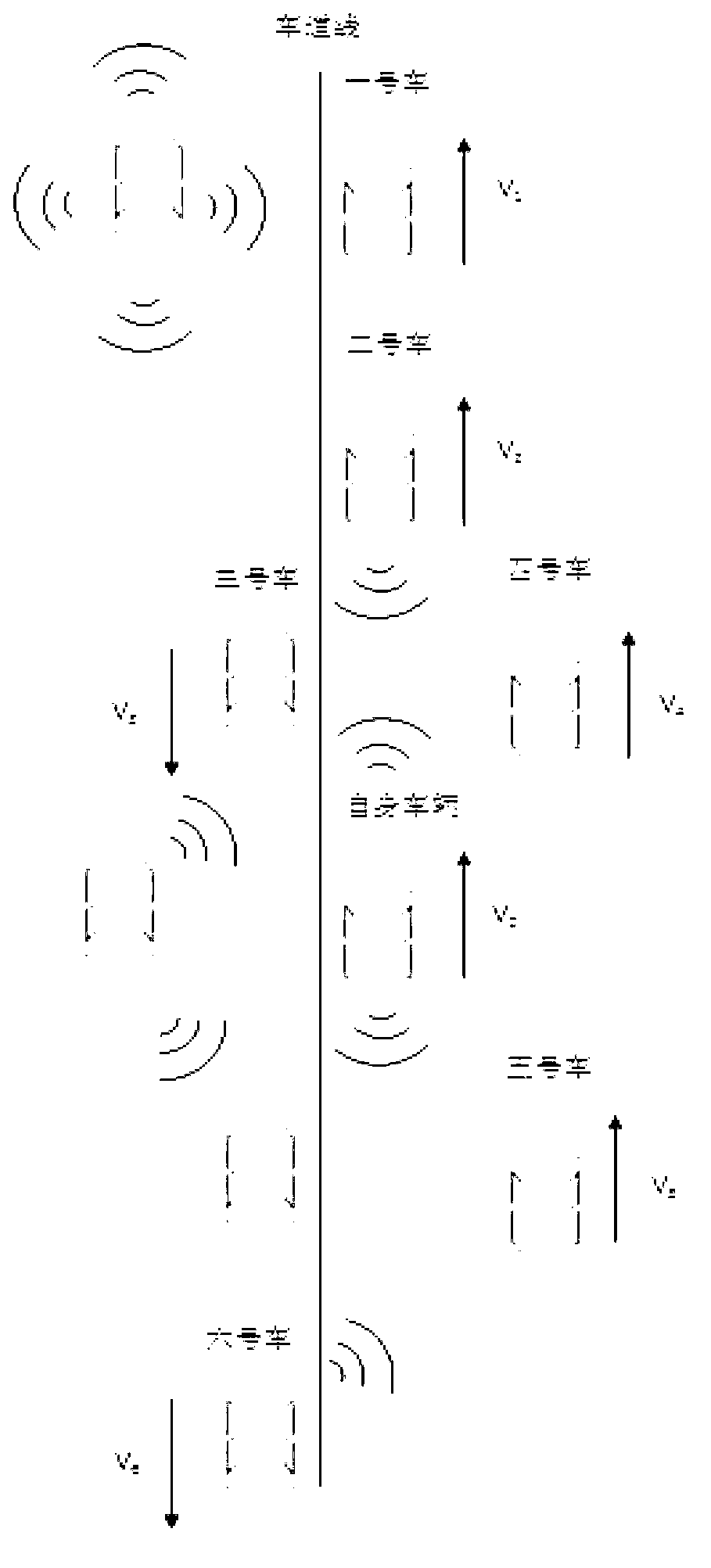
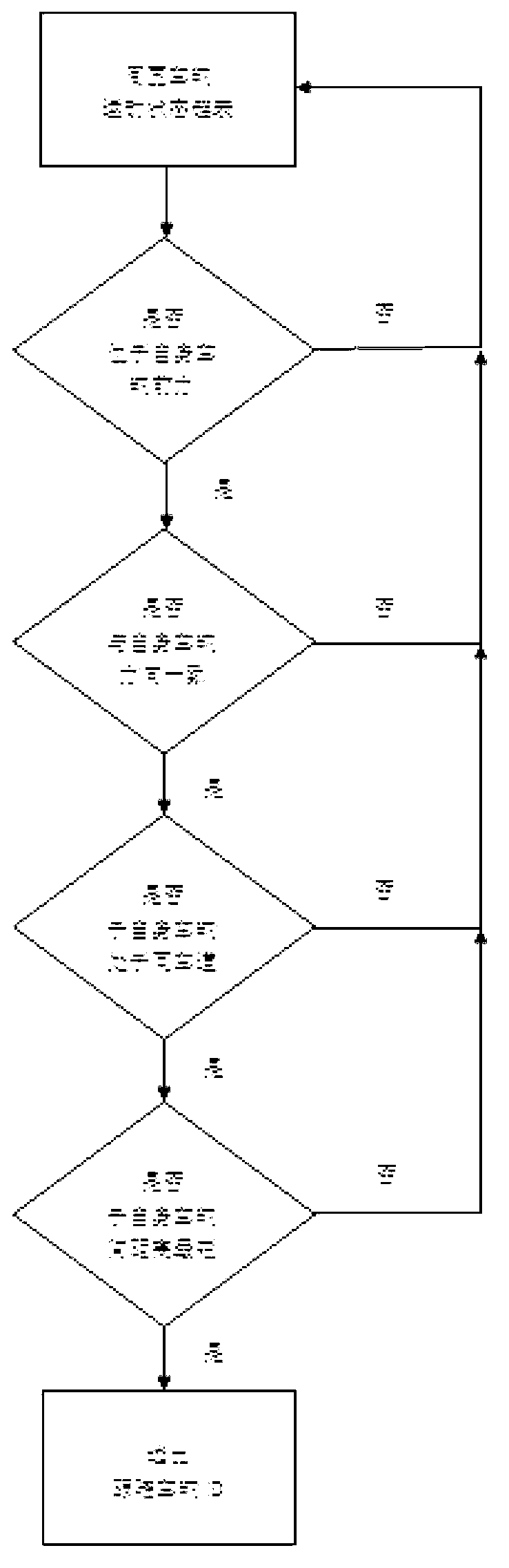
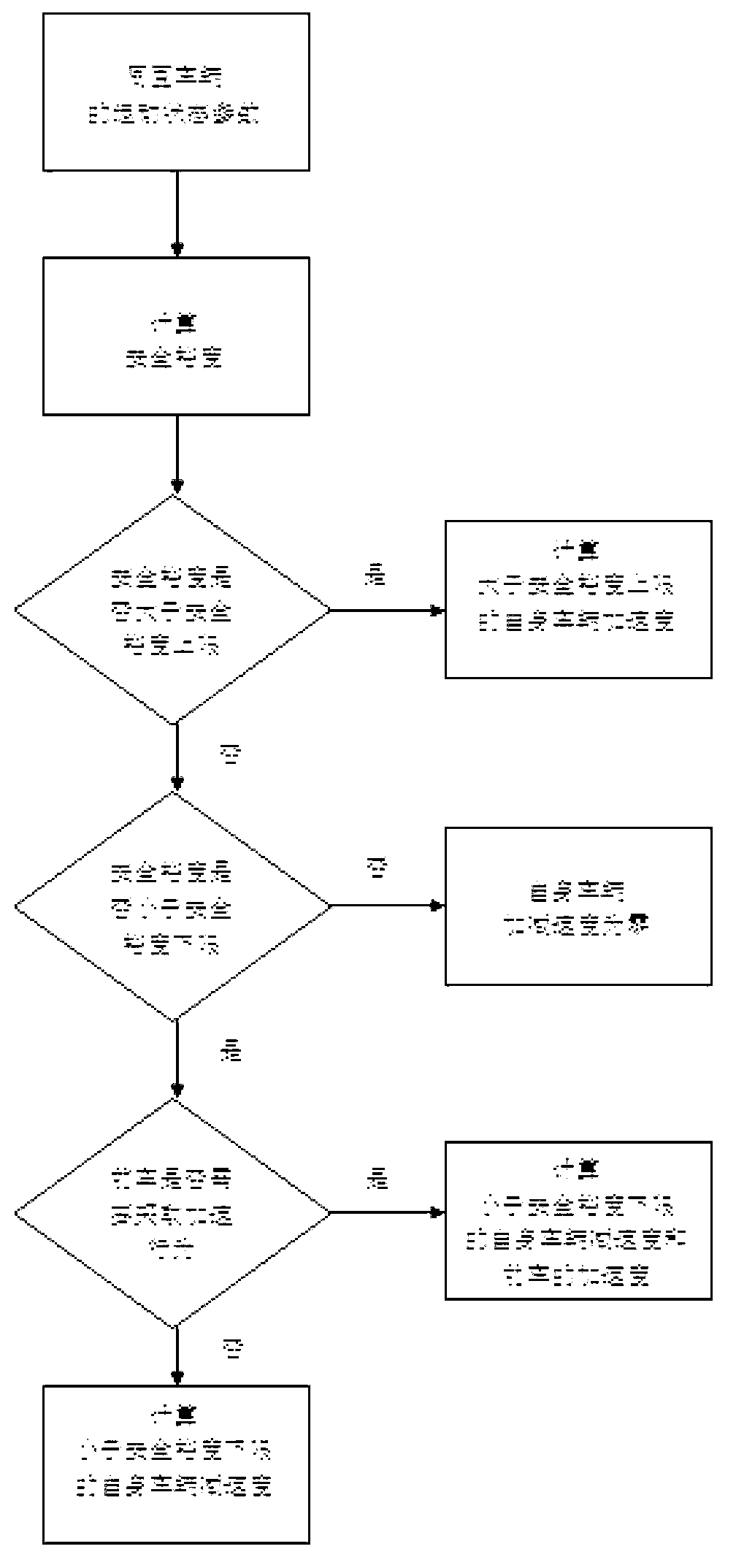
[0030] The present invention is based on the vehicle-vehicle coordination car-following auxiliary control system. The system is mainly based on vehicle-to-vehicle communication. Through the wireless communication device set up on the vehicle, the motion state parameters of the own vehicle are sent to the surroundings. Motion state parameters, to determine the target object that needs to take the car-following behavior. If car-following behavior is required, the system will enter the car-following mode and control the vehicle so that it can follow the vehicle in front within a certain safe car-following distance and safety car-following margin to prevent rear-end collision accidents.
[0031] Such as figure 1 The two-way four-lane road section shown is a typical application scenario of the car-following assistance control system based on vehi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More