

Mobile robot capable of jumping
A mobile robot and mobile device technology, applied in the field of mobile robots, can solve the problems of limited motion ability, limited application fields, and no advantages, etc., and achieve the effects of controllable trajectory, flexible movement, and high energy utilization rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Below in conjunction with accompanying drawing, specific mode measure of the present invention is described in detail:
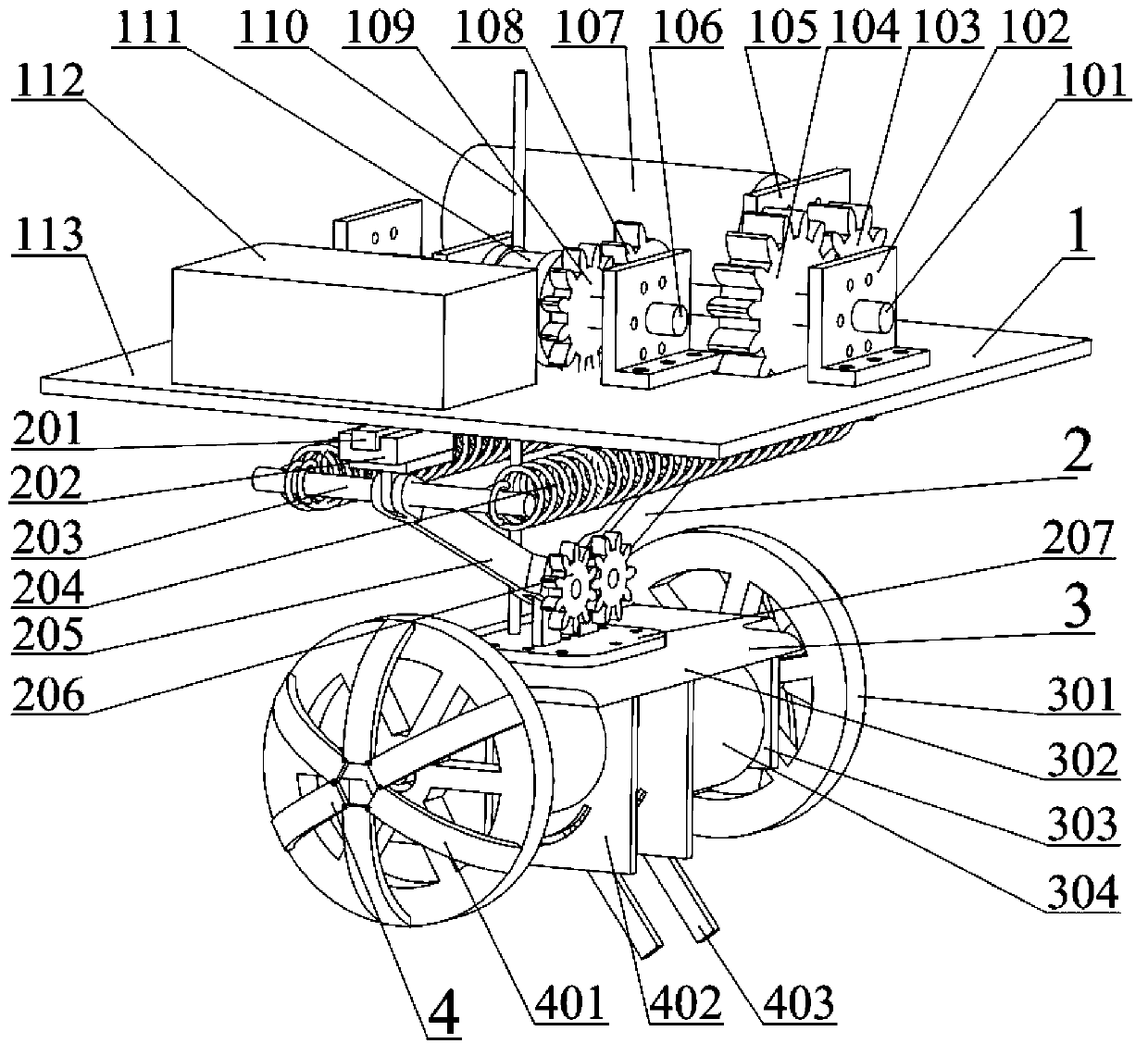
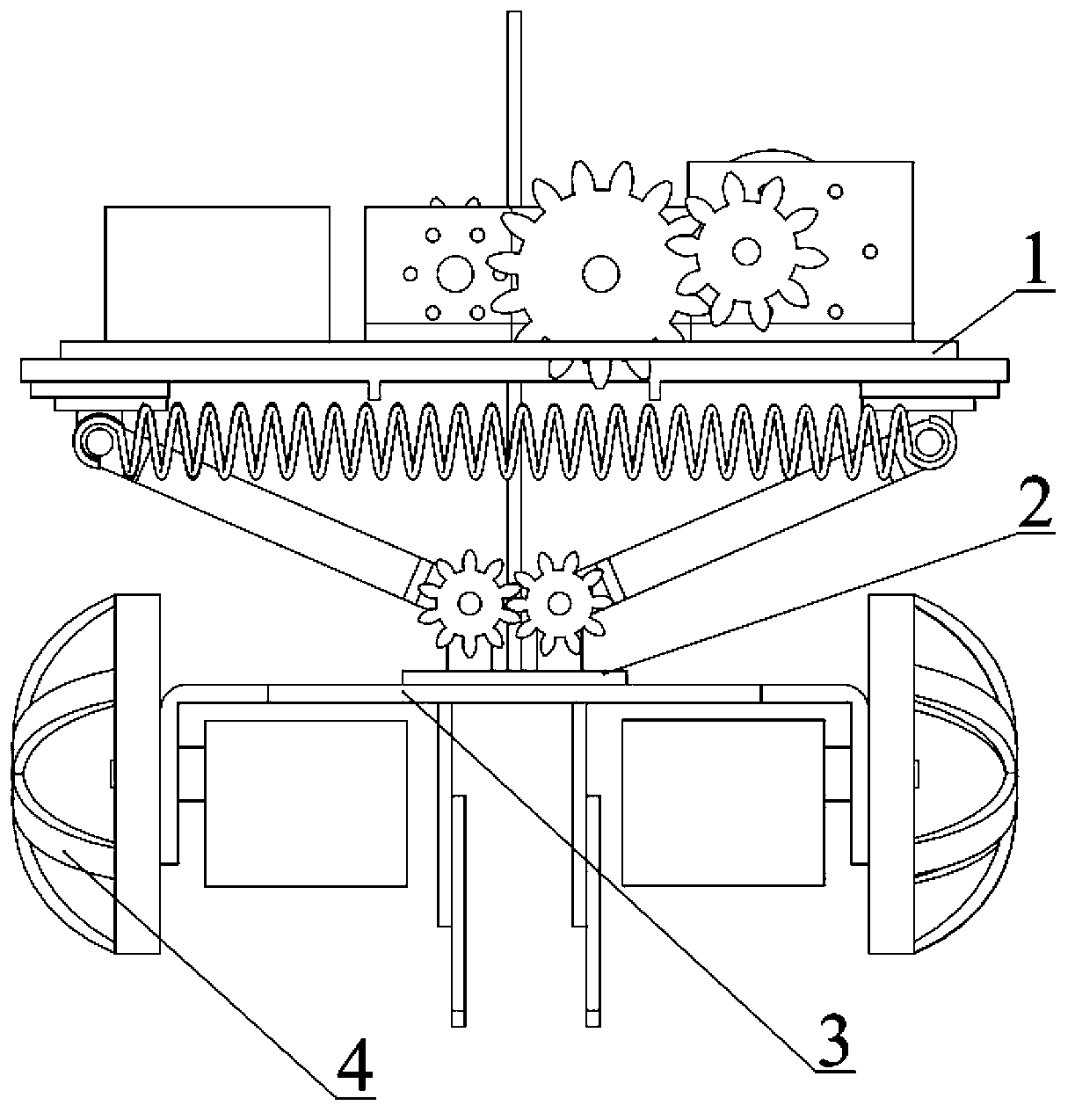
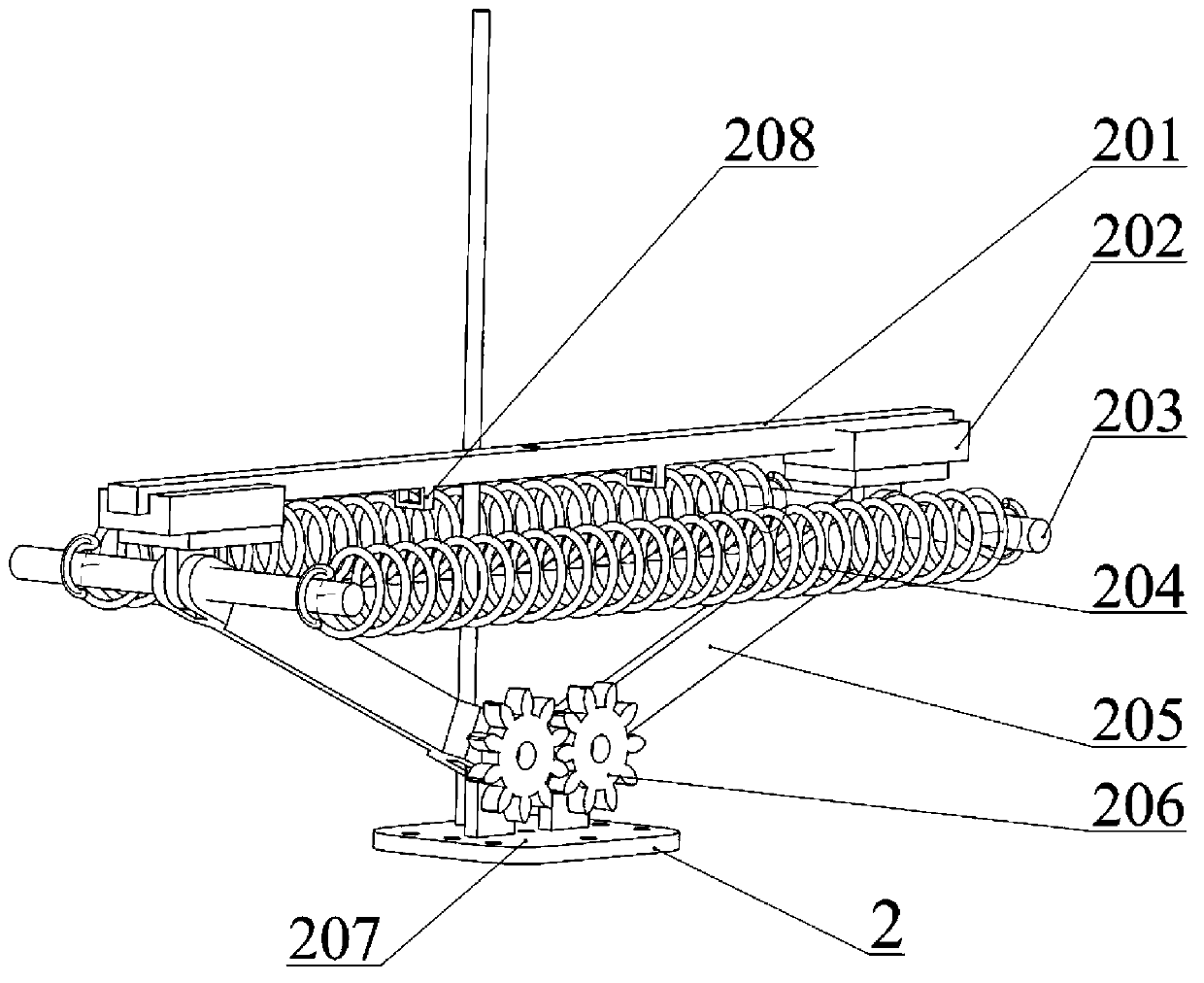
[0031] The present invention provides a two-wheeled robot capable of moving and jumping. The wheeled mobile device 3 can independently select translational and jumping motion modes according to geographical conditions by relying on self-balancing control. like figure 1 and 2 As shown, the present invention includes four parts: wheeled mobile device 3, spring lock release device 1, spring jumping mechanism 2, landing buffer and attitude adjustment mechanism 4, spring lock release device 1 is above wheeled mobile device 3, and the two pass spring The jumping mechanism 2 is connected, and the landing buffer and posture auxiliary adjustment mechanism 4 is connected on the wheeled mobile device 3 . The whole robot system mainly relies on the spring jumping mechanism 2 to jump over obstacles, and the wheeled mobile device relies on the self-balancing syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More