

Quadruped stair climbing robot mechanism
A technology for climbing stairs and robots, applied in the field of robots, can solve the problems of weak braking ability, destructive road surface, inflexible movement, etc., and achieve the effect of not easy to fall and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
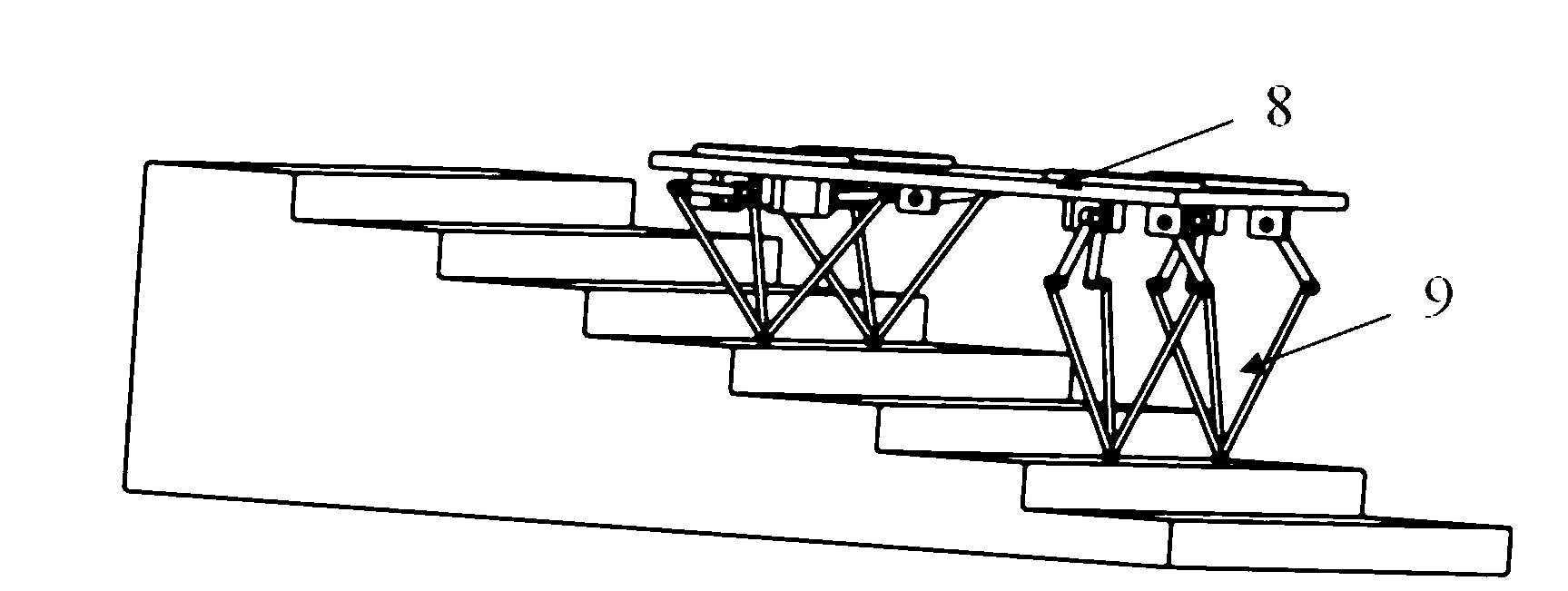
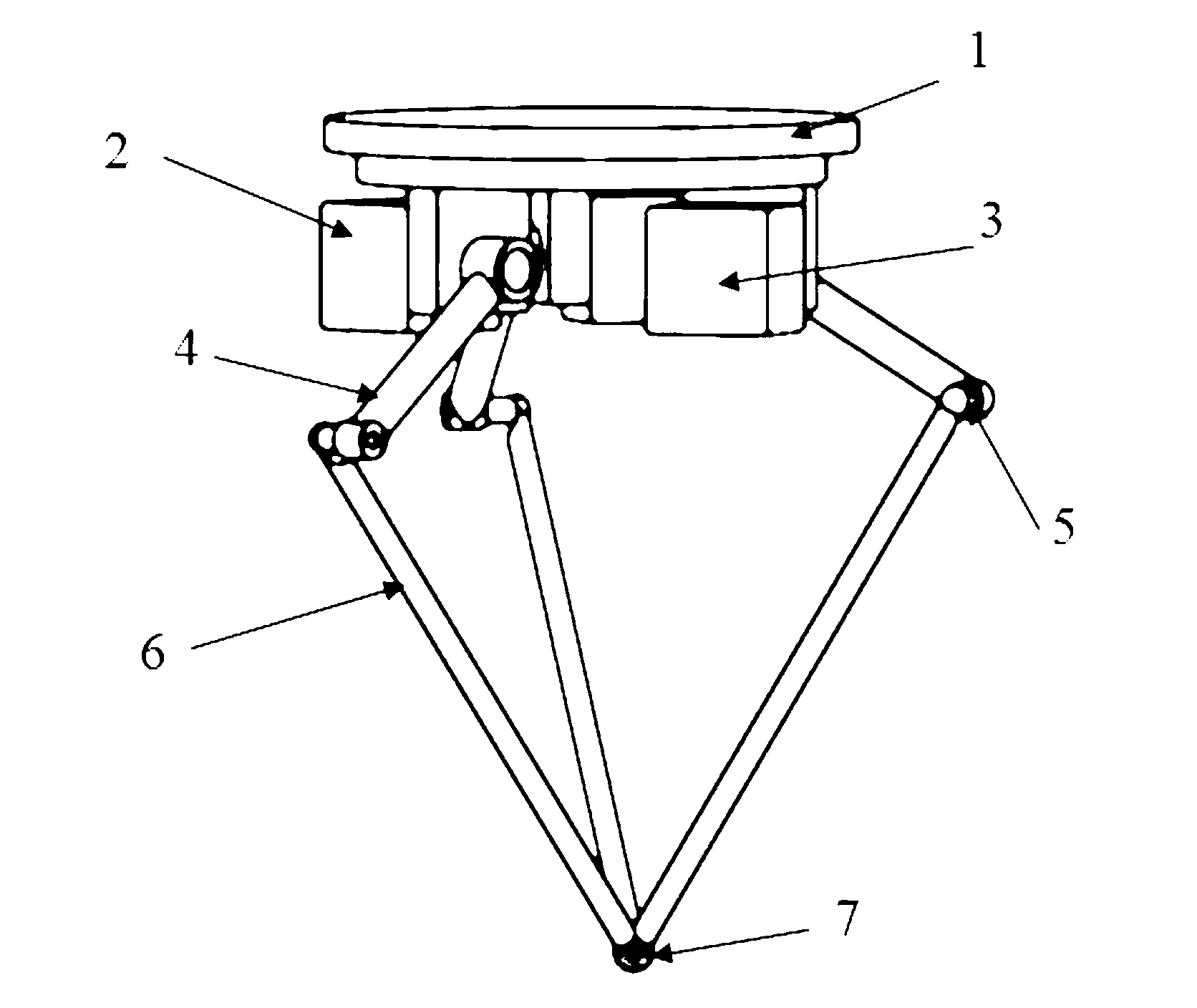
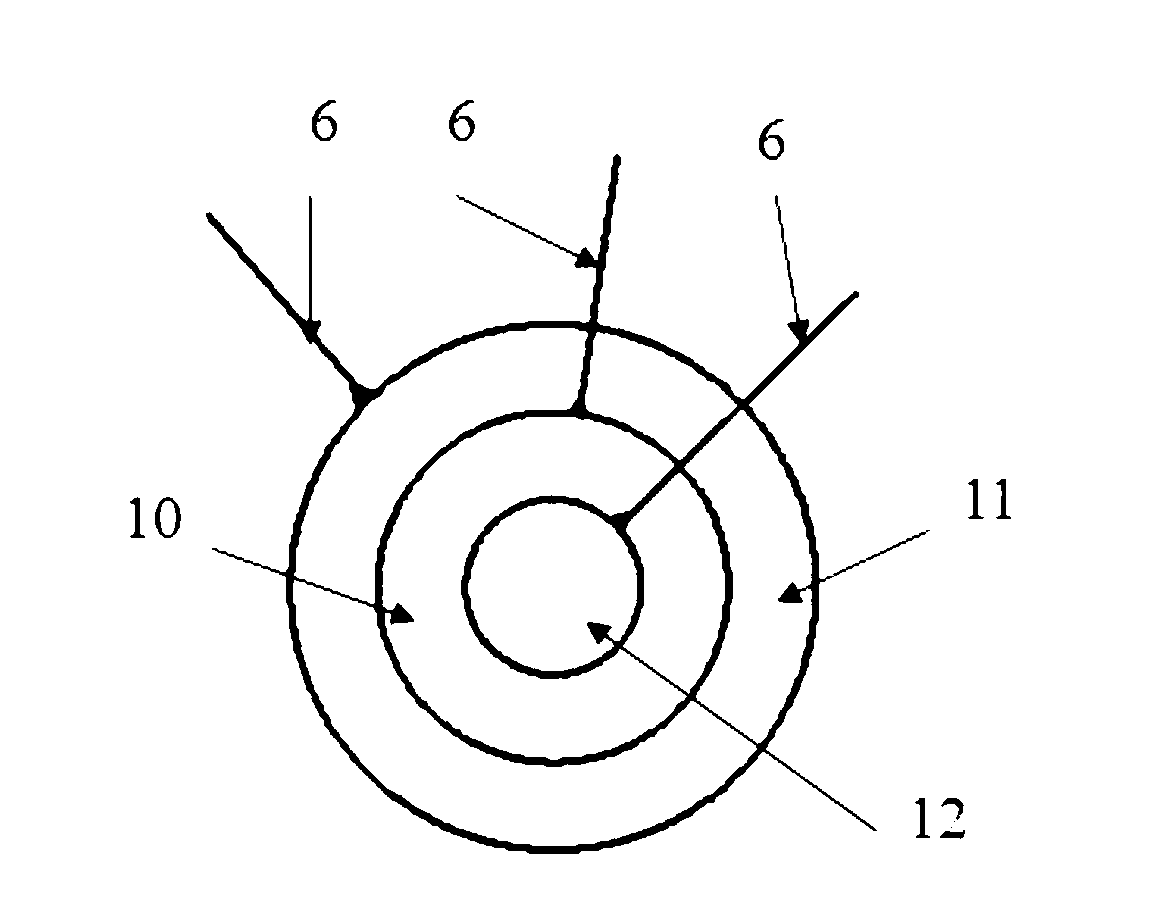
[0014] see Figure 1 ~ Figure 3 , a four-legged stair-climbing robot mechanism, including an upper body 8 and four parallel feet 9 with the same structure connected thereto, two left and right parallel feet 9 are located at the front and lower part of the upper body 8, two The left and right parallel feet 9 are located at the rear and lower side of the upper body 8 . Each of the feet 9 includes a fixed platform 1 affixed to the upper body 8, a contact pin 7, and three structurally identical kinematic branch chains connected between the fixed platform 1 and the contact pin 7, three The kinematic branch chains are arranged symmetrically and evenly. Each motion branch chain includes a master arm 4 and a slave arm 6, one end of the master arm 4...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More