

Satellite attitude rapid maneuver switching control method
A satellite attitude and control method technology, applied in the direction of attitude control, adaptive control, general control system, etc., can solve problems such as large amount of calculation, failure to achieve optimal maneuvering, and failure to consider the actual constraints of the on-board computer
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The embodiments of the present invention are described in detail below: the present embodiment implements under the premise of the technical solution of the present invention, provides detailed implementation and specific operation process, but protection scope of the present invention is not limited to the following implementation example.
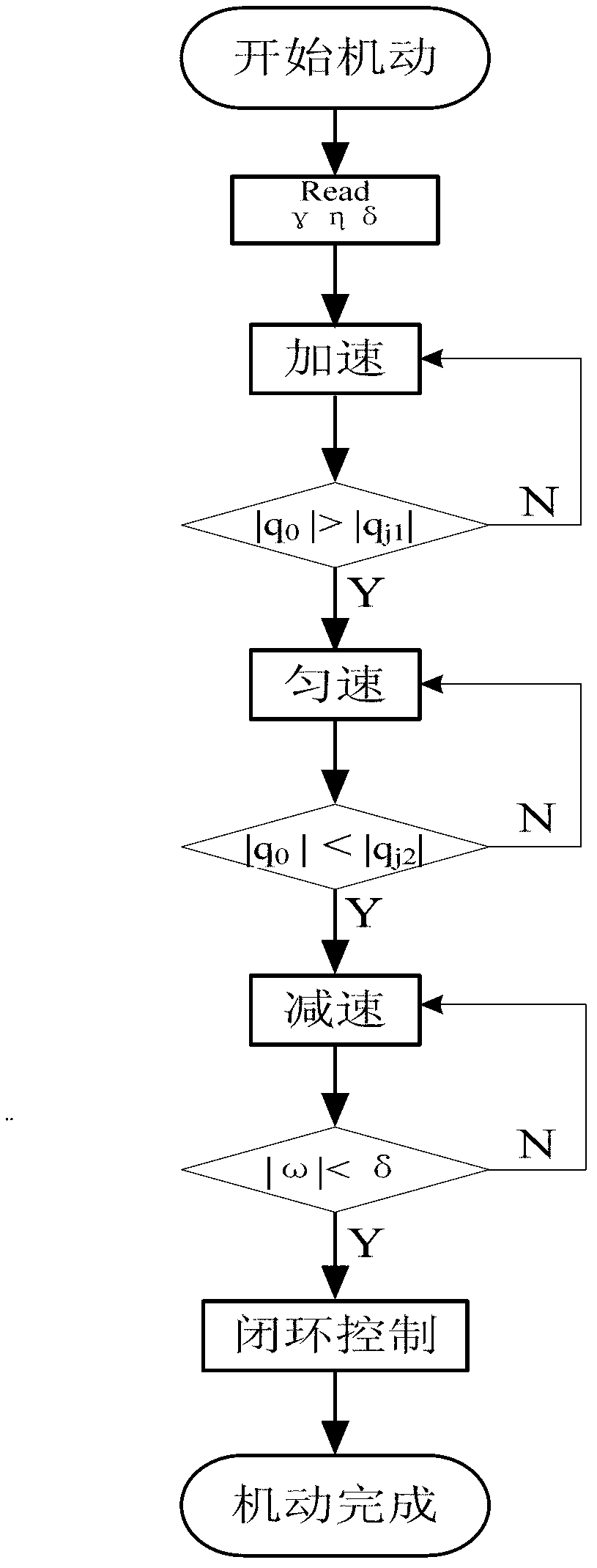
[0042] Such as figure 1 As shown, the present embodiment provides a fast maneuvering switching control method for satellite attitude, comprising the following steps:
[0043] Step 1. First calculate the initial quaternion value of the current attitude relative to the target attitude at the beginning of the satellite maneuver, and then determine the three-dimensional quaternion according to the initial value, the maximum output torque and maximum angular momentum of the actuator, the range limit of the measuring device, and the size of the satellite inertia. A switching parameter γ, η, δ and a closed-loop control parameter constant...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More