

Curved surface self-adaption magnetic adsorption wall-climbing robot
A wall-climbing robot and self-adaptive technology, applied in the field of mobile robots, can solve problems such as poor obstacle surmounting ability, poor load carrying capacity, and poor self-adaptive ability of curved surfaces, so as to improve motion safety performance, improve adsorption efficiency, and increase adsorption area Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
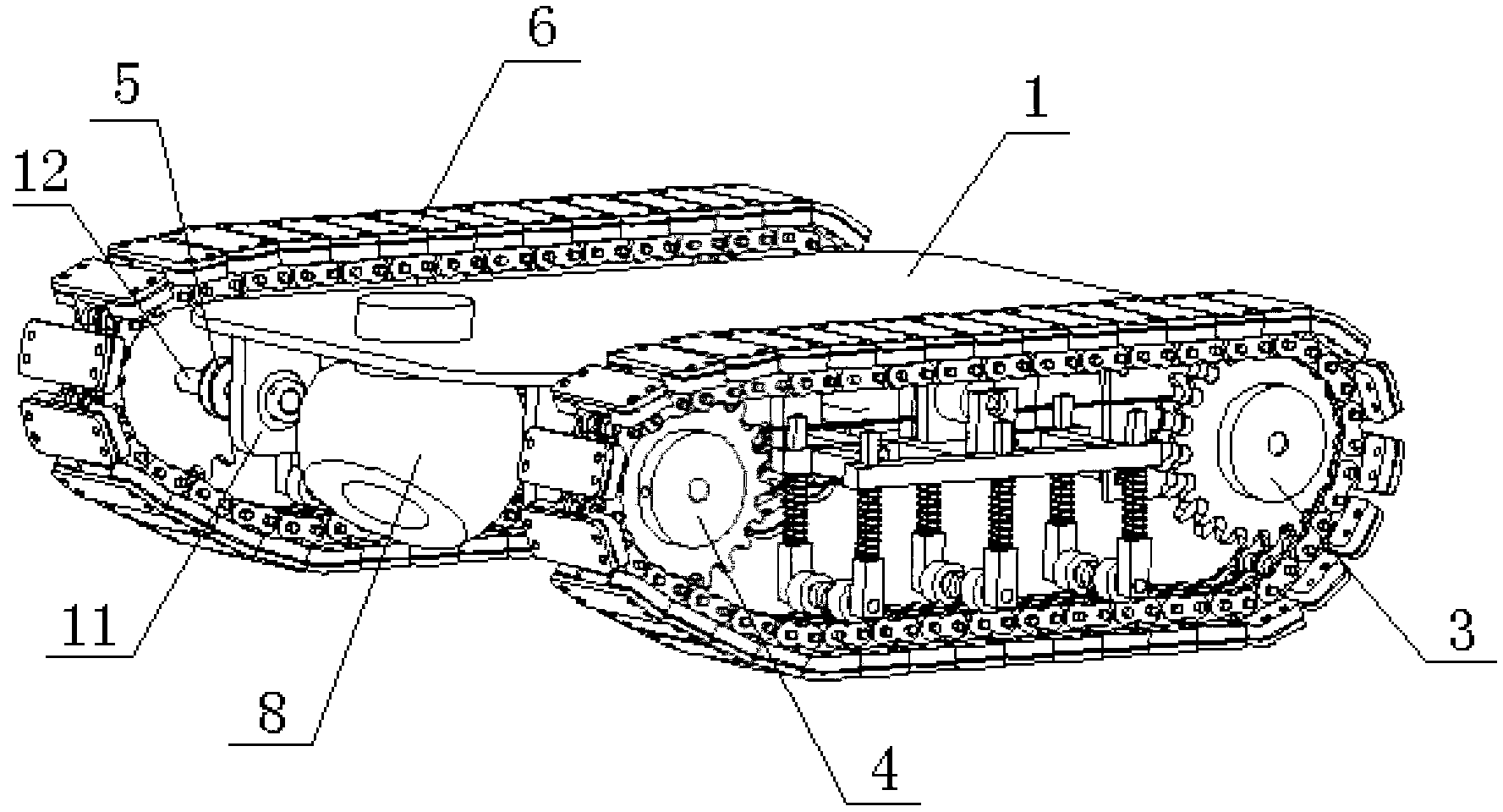
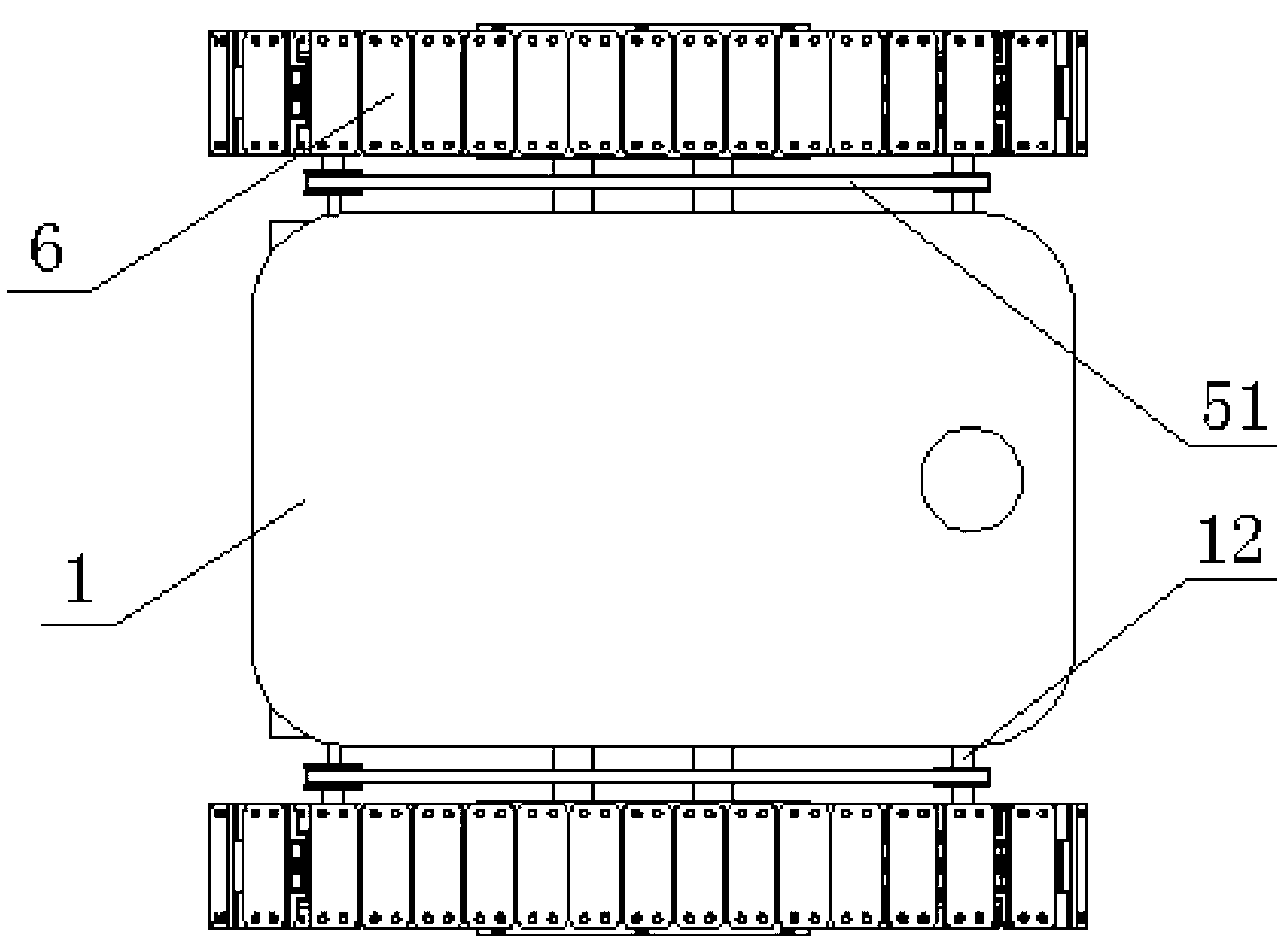
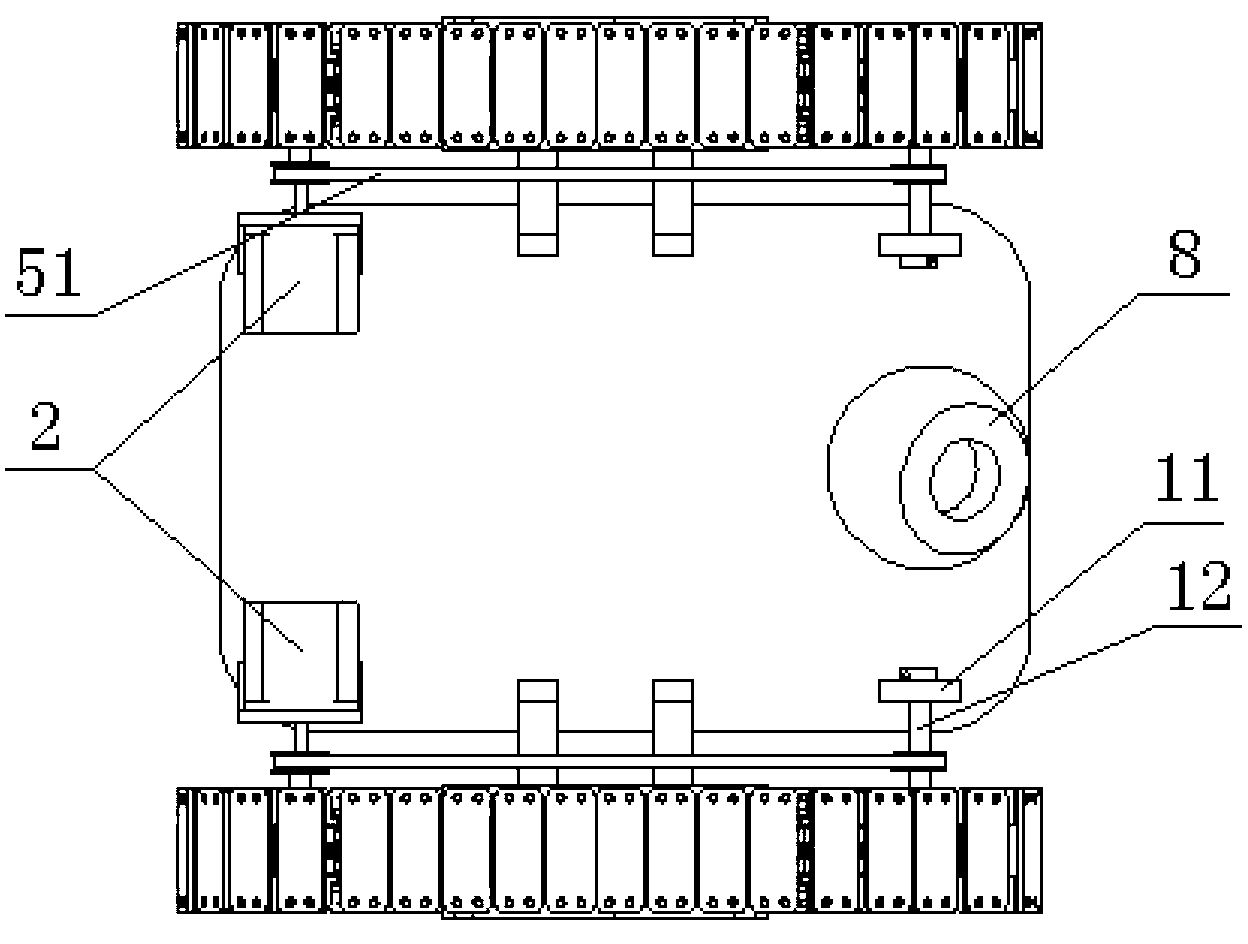
[0022] As shown in the figure, a curved surface adaptive magnetic adsorption wall-climbing robot includes a car body 1 and a sprocket drive assembly arranged on both sides of the car body 1. The sprocket drive assembly includes a drive motor 2, a drive sprocket 3 and a driven The sprocket 4 and the drive motor 2 are fixedly mounted on the bottom of the car body 1, and the drive sprocket 3 is fixedly mounted on the drive shaft of the drive motor 2 coaxially. The bottom of the car body 1 is fixedly provided with a driven wheel fixed plate 11, and the driven wheel fixed plate 11 is connected with the driven wheel shaft 12, the driven sprocket 4 is coaxially fixed on the driven wheel shaft 12, and the drive shaft of the drive motor 2 and the driven wheel shaft 12 are respectively coaxially fixed with a synchronous pulley 5. A synchronous belt 51 i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More