

Method and apparatus for pose recognition
A posture and equipment technology, applied in the direction of character and pattern recognition, design optimization/simulation, special data processing applications, etc., can solve the problem of increasing the time for calculating the amount of posture information, and achieve the effect of improving the speed of posture recognition and reducing the number
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Reference will now be made in detail to embodiments of the present disclosure, examples of which are illustrated in the accompanying drawings, wherein like numerals refer to like elements throughout.
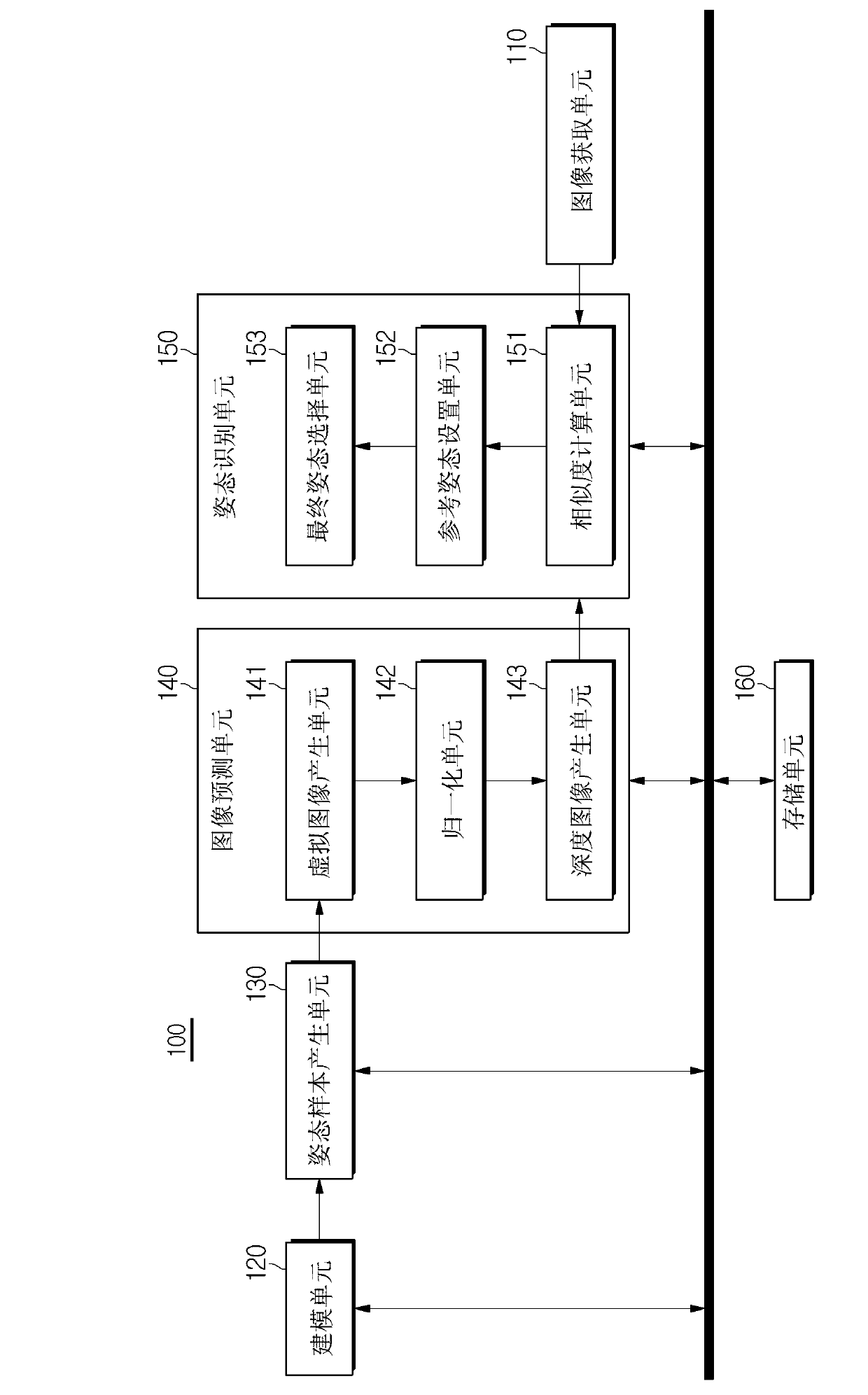
[0034] figure 1 is a diagram showing the configuration of the gesture recognition device 100 according to the embodiment of the present disclosure. refer to figure 1 , the gesture recognition device 100 may include an image acquisition unit 110 , a modeling unit 120 , a gesture sample generation unit 130 , an image prediction unit 140 , a gesture recognition unit 150 and a storage unit 160 .
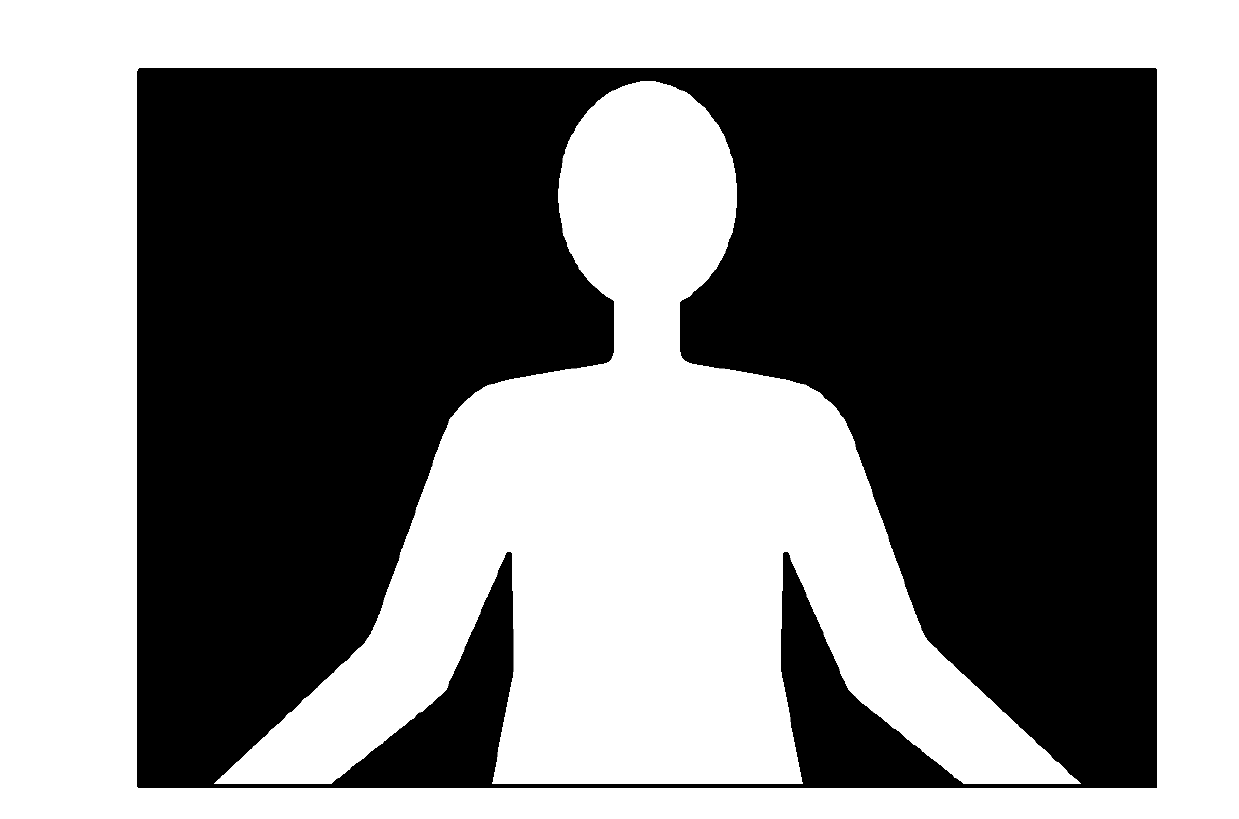
[0035] The image acquisition unit 110 includes a main sensor or a depth camera. The image acquiring unit 110 captures an image of a target to acquire a depth image about the target. figure 2 is a diagram showing an example of a depth image obtained by an image acquisition unit in practice. according to figure 2 In the depth image shown in , the bright part indicates that the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More