

Remote-end suspension touch control equipment and method for nine-axis inertial directional input device
An input device and directional input technology, applied in the input/output process of data processing, instruments, electrical and digital data processing, etc., can solve the problem that the user cannot control the terminal equipment by simulating touch, and cannot realize the positioning and mapping input of intelligent equipment, etc. problem, to achieve the effect of remote control terminal device, high-precision positioning and mapping input
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0043] Based on the first embodiment, the present invention proposes a second embodiment, a remote floating touch method for a nine-axis inertial orientation input device, including the following steps:
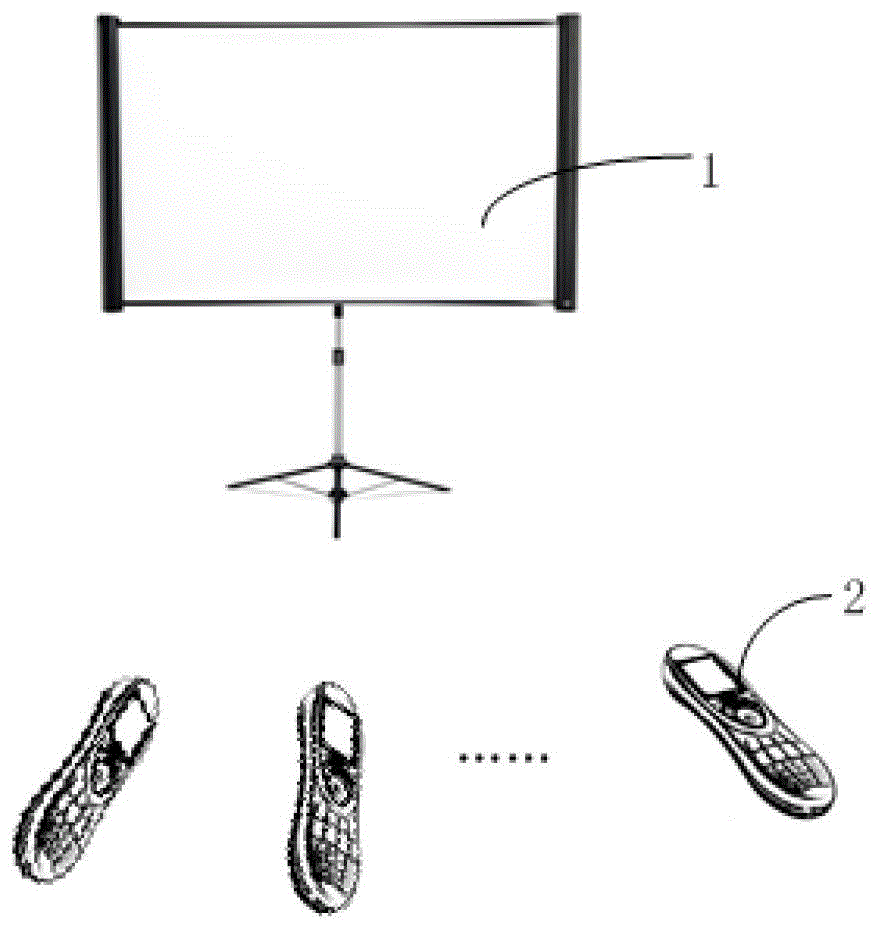
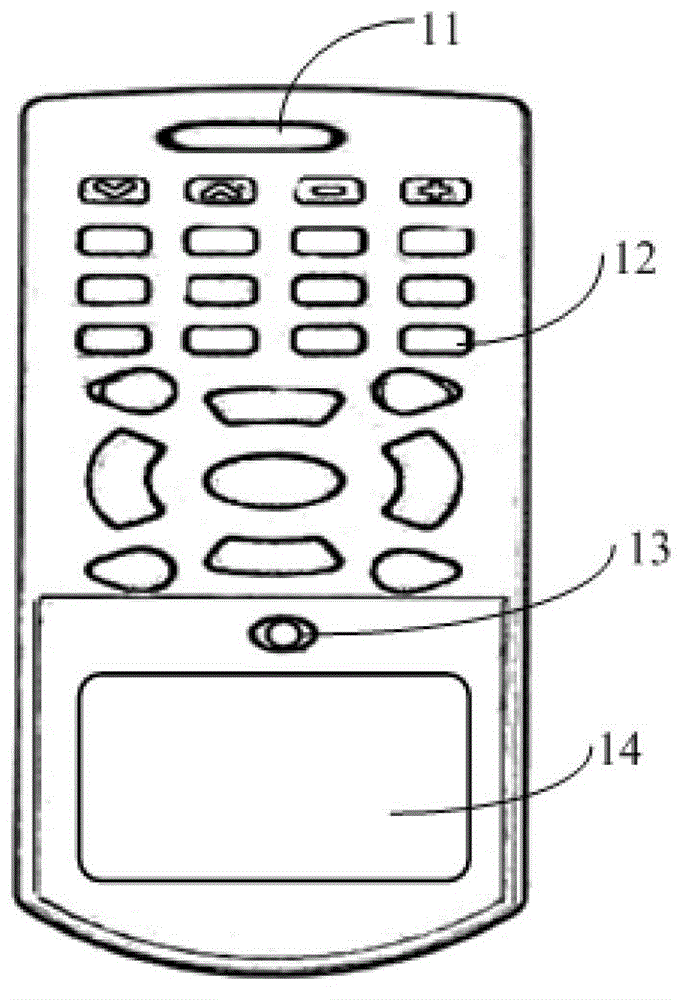
[0044] S1. The input device receives the user's input command, and transmits the user's input command and the absolute coordinate value to the terminal device. Wherein, the user's input instruction includes but not limited to key input, mushroom head input, trackball input, touch panel input or voice input.
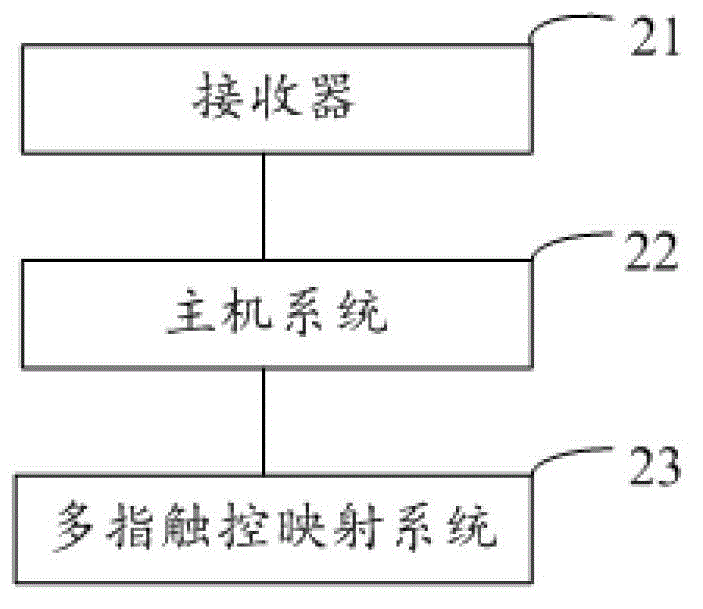
[0045] S2. The terminal device maps the absolute coordinate value to the screen through the multi-touch system, and selects the operation mode through the operation of the command, and at the same time fixes the current coordinate point of the terminal device on the screen.
[0046] S3. The input device receives the user's action input, and transmits the coordinate change or motion trajectory generated by the user's action input to the terminal device. Wherein, the inst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More