Robot safety path planning method based on dynamic region division
A technology of area division and safe path, applied in two-dimensional position/channel control and other directions, can solve the problem of static environment without any changes of the robot, and achieve the improvement of scalability, the probability of successful expansion, and the improvement of duration. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solutions of the present invention will be further described in detail below through embodiments and in conjunction with the drawings.
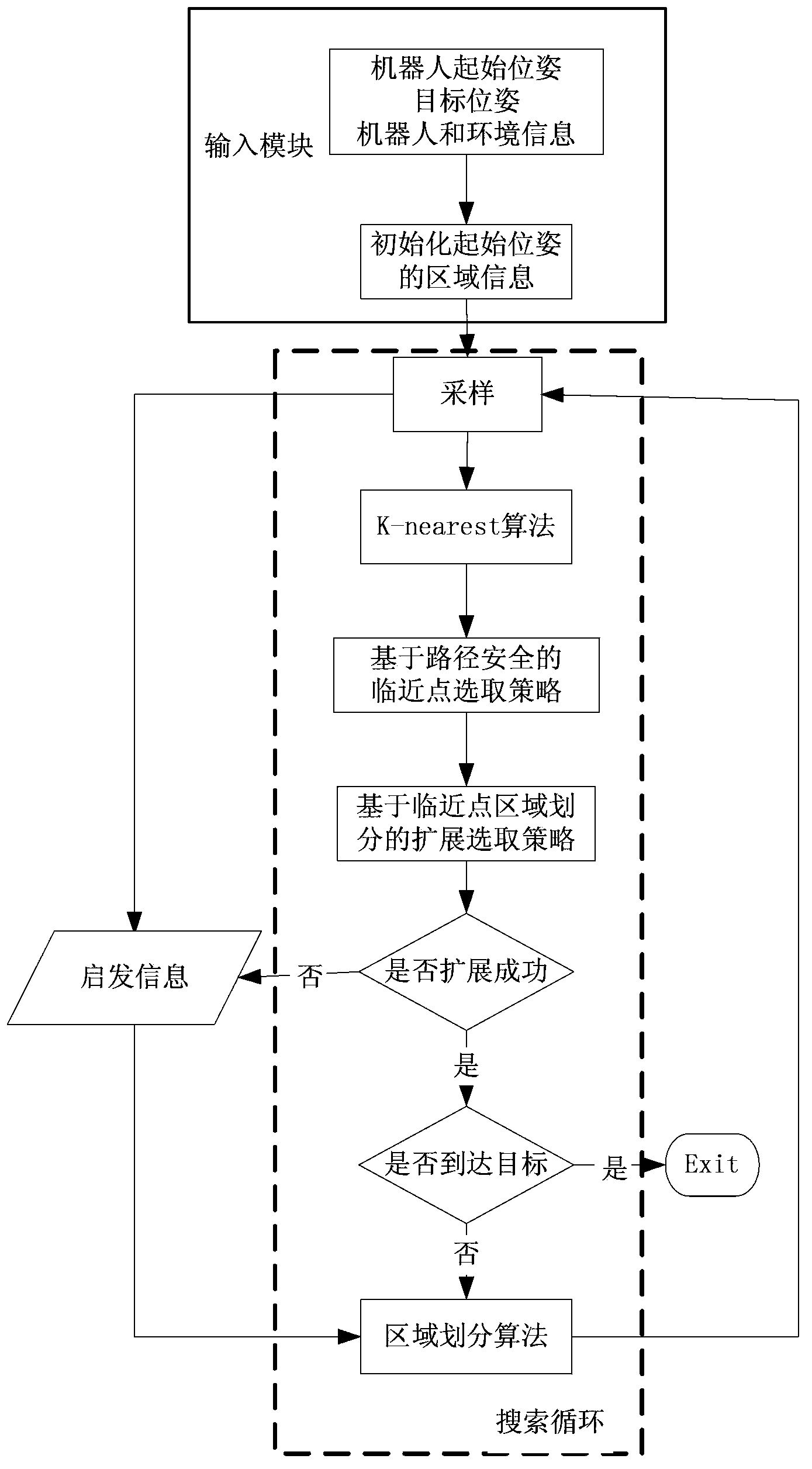
[0034] The present invention enhances and improves the expansion method of RRT, figure 1 It is the flow chart of the safe path generation algorithm based on area division in this embodiment. The description is as follows:
[0035] (1) When RRT expands a new node, it first generates a sampling point that needs to be randomly selected in space as the expansion direction, such as figure 1 The search loop in the dotted box.
[0036] (2) After selecting the expansion direction, an expanded parent node needs to be selected on the path map.
[0037] First, return the K nodes with the shortest path from the random sampling point on the path map, and add the security evaluation criterion based on the effective entropy of the node, and select the safest node from the K neighboring nodes, that is, the node with the least obstacles in the ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com