

Robot software architecture
A software architecture, robotics technology, applied in the direction of instruments, simulators, computer control, etc., can solve problems such as unfavorable maintenance and upgrades of closed structures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solution of the software architecture of the robot will be described in detail below in combination with specific embodiments and accompanying drawings, so as to make it more clear.
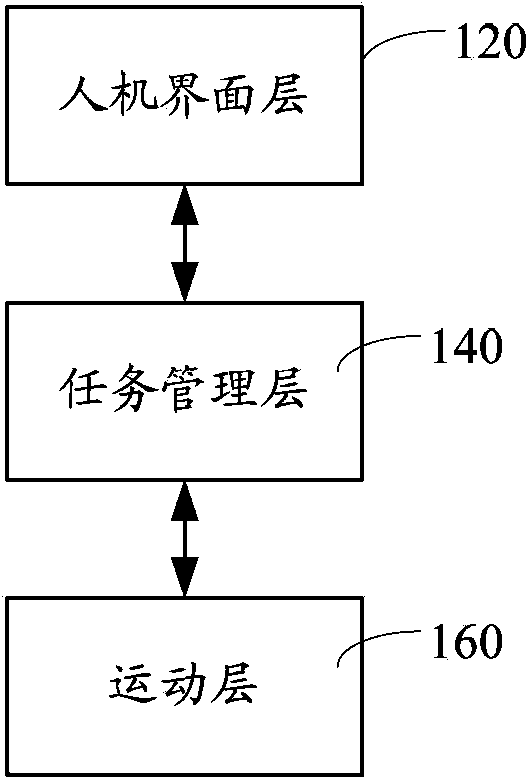
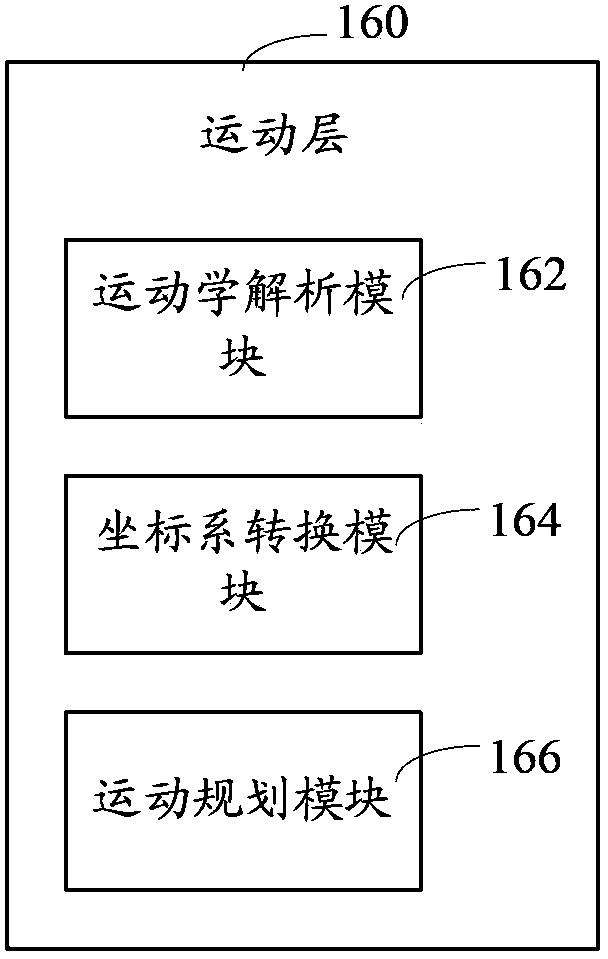
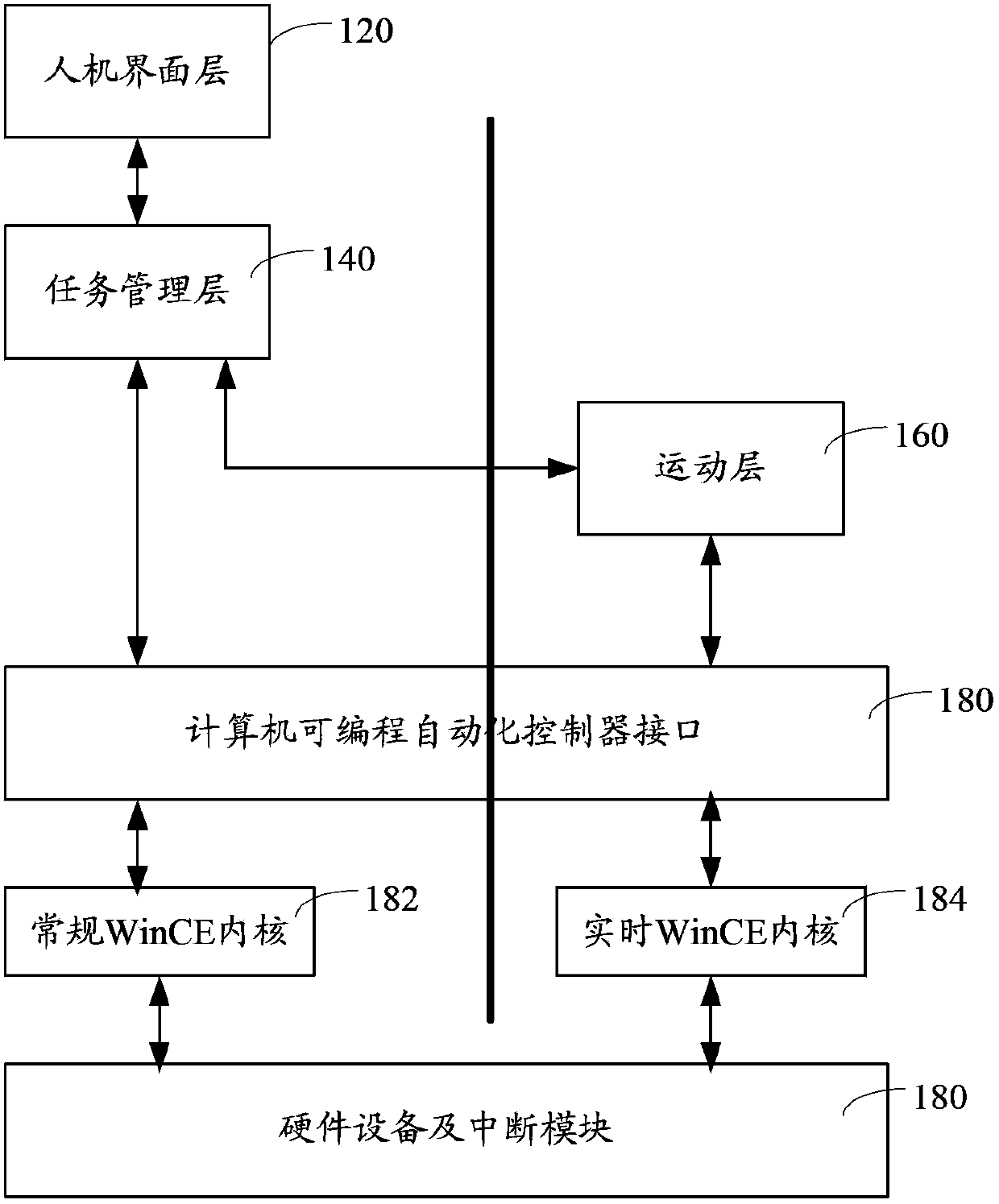
[0026] Such as figure 1 Shown is a schematic structural diagram of the software architecture of the robot in an embodiment. The software architecture of the robot includes, from the top layer to the bottom layer: a man-machine interface layer 120 , a task management layer 140 and a motion layer 160 .
[0027] Wherein, the man-machine interface layer 120 is used for receiving input instruction information.
[0028] Specifically, the man-machine interface layer 120 is a direct interface between the software architecture of the robot and the user, and can receive all instructions from the user. The instruction information is input by the user through an input device such as a keyboard or a touch screen. On the human-machine interface layer 120, users can carry out secondary d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More