

Polymorphic spherical hopping robot
A robot, spherical technology, applied in the field of robotics, can solve the problems of weak movement ability, single movement mode and state of spherical robots, poor adaptability and flexibility, etc., to reduce mass, improve stability and continuity, and improve mechanical strength. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
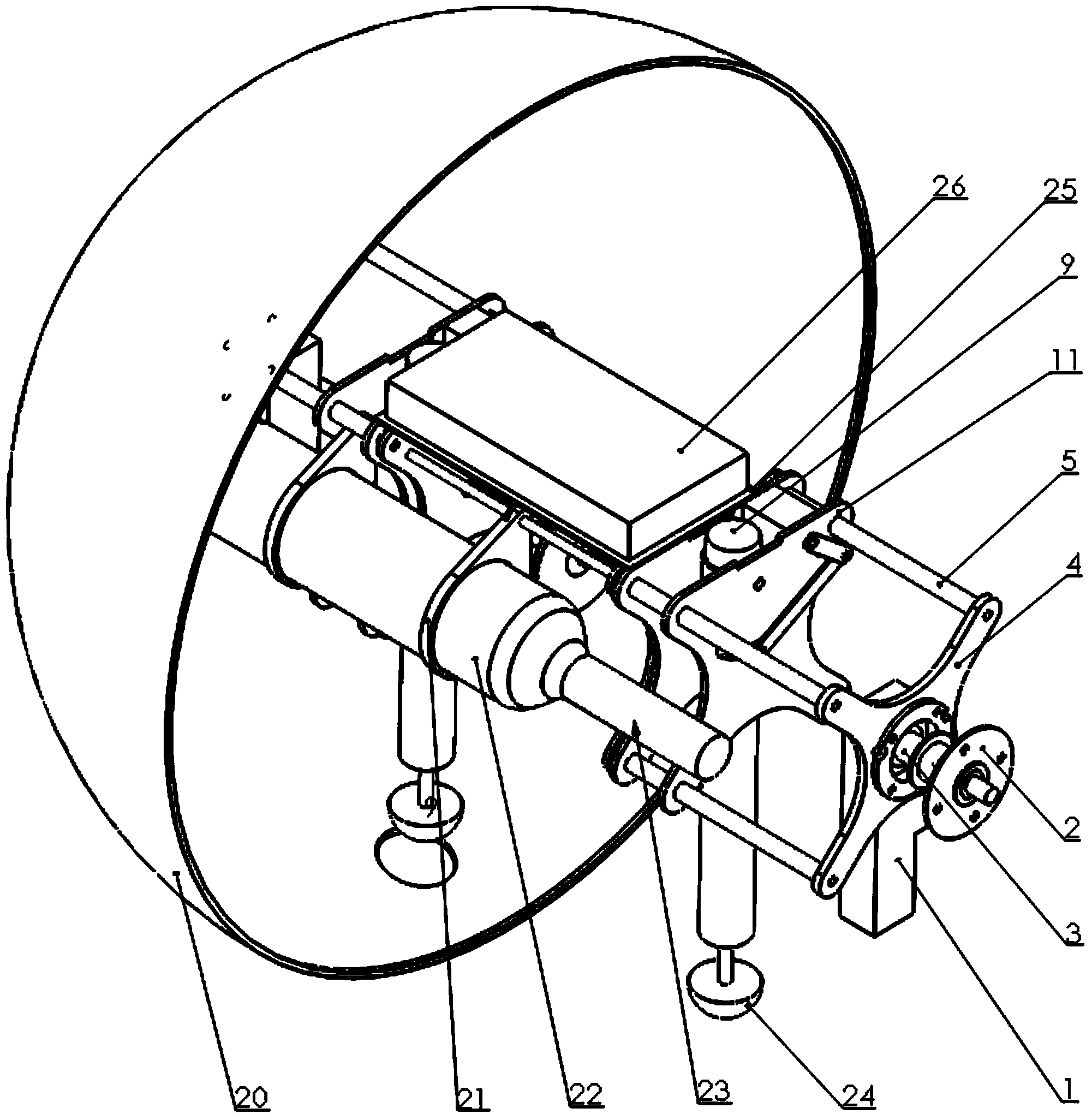
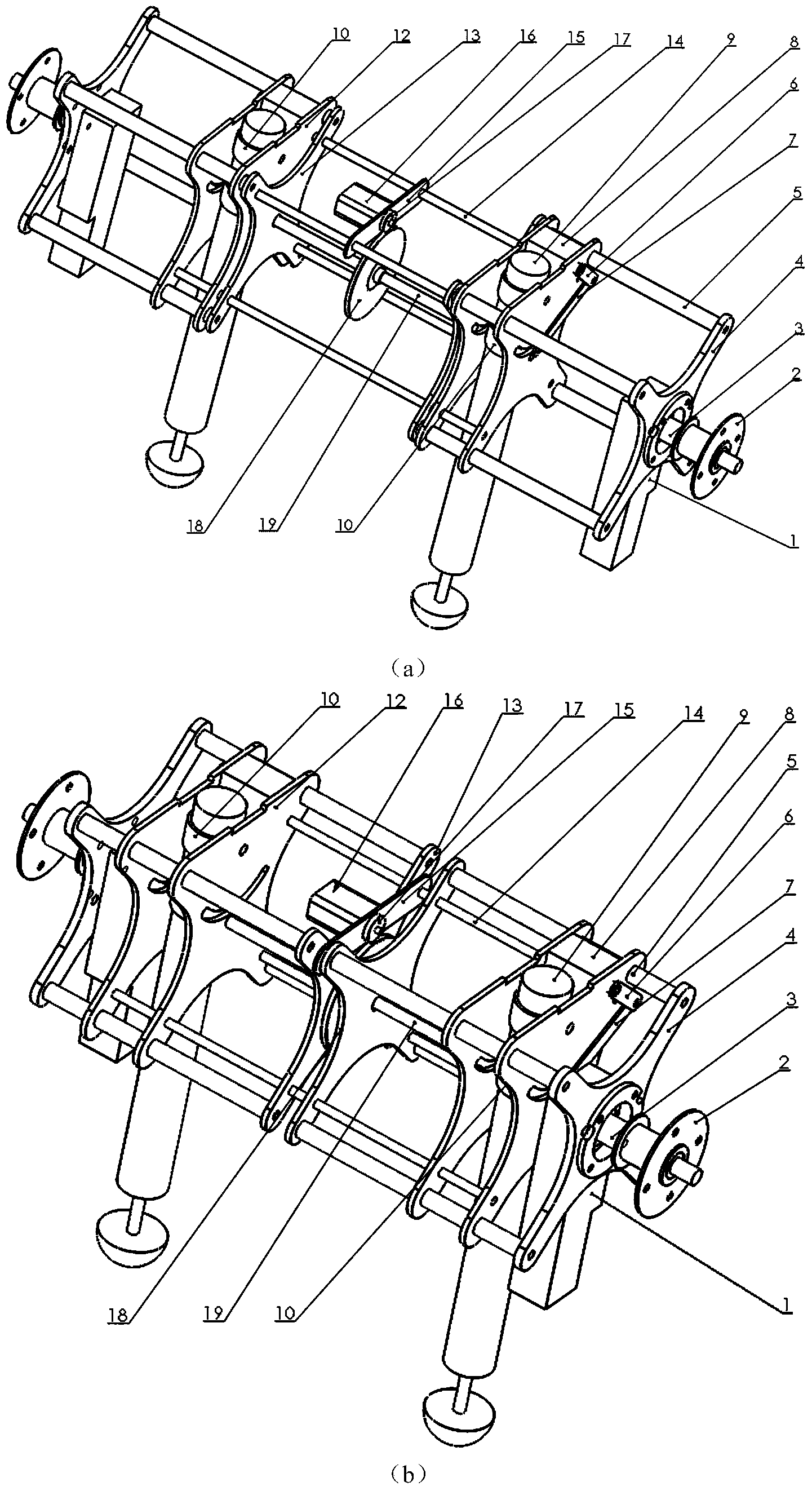
[0058] Such as figure 1 , 2 As shown, the mechanical body of the polymorphic spherical jumping robot includes two cylinder fixed frames, each cylinder fixed frame is fixedly connected by a fixed frame outer plate 11 and a fixed frame inner plate 12, and the double-acting cylinder 9 tops are fixed by a locking buckle 10 is fixed between the inner plate 12 of the fixed frame and the outer plate 11 of the fixed frame. The locking buckle 10 includes the locking buckle on the lower part of the double-acting cylinder and the locking buckle on the upper part of the double-acting cylinder; the lower part of the cylinder piston rod is equipped with a cylinder pad 24. The two fixed frames of the cylinder have the optical axis of the fixed frame passing through; and the fixed frames of the cylinder are all fixedly connected with the optical axis 14 of the fixed f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More