

Near space vehicle robust control method with input saturation
A near-space vehicle, robust control technology, applied in the field of flight control, can solve problems such as system buffeting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
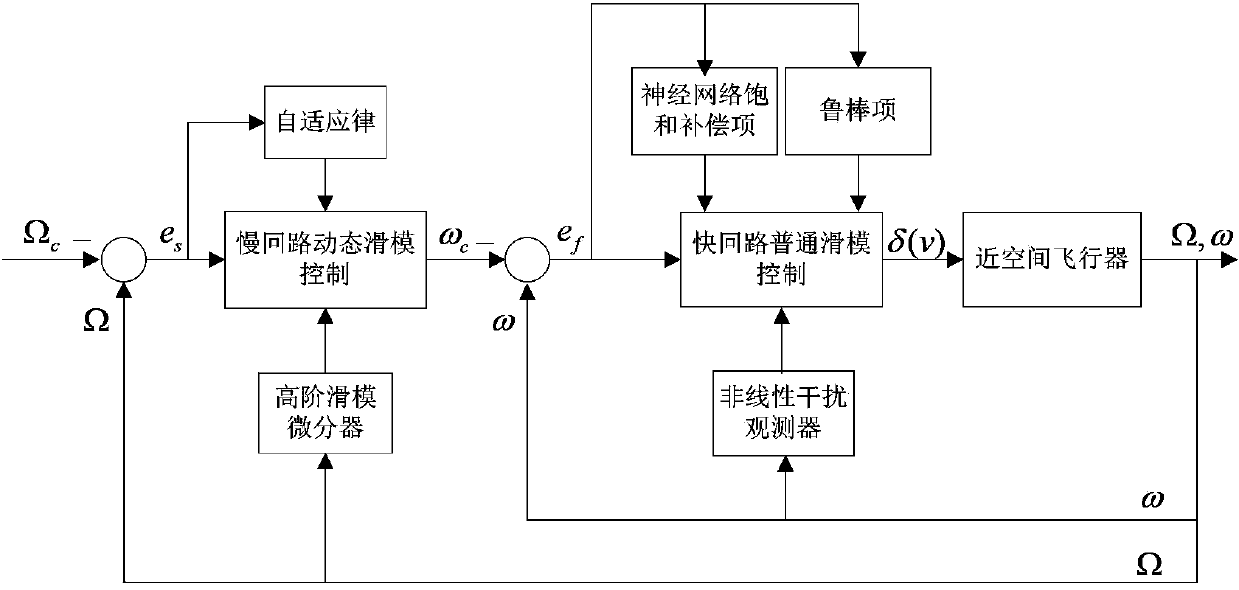
[0065] Such asfigure 1 As shown, the present invention has a robust control method for near-space aircraft with input saturation. According to the principle of singular perturbation and time-scale separation, the attitude loop of the aircraft is divided into a slow loop and a fast loop. The method is based on the control system of the slow loop , a fast loop control system and a closed-loop control system composed of an aircraft to realize, it is characterized in that, comprising the following steps:
[0066] (1) Transform the slow loop control system and the fast loop control system into an affine nonlinear system equation form, as follows:
[0067] A. The affine nonlinear system equation of the slow loop is:
[0068] In the formula, Ω=[α,β,μ] T is the current attitude angle signal, α, β and μ represent the angle of attack, sideslip angle and roll angle respectively, Indicates the derivative of Ω; f s (Ω)=[f s1 ,f s2 ,f s3 ] T , ω c is the control law of the slow l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More