

Inertially stabilized platform disturbance observer design method based on angular acceleration
An inertial stabilization platform and interference observer technology, which is applied in the field of aerial remote sensing inertial stabilization platforms, and can solve problems such as insufficient platform interference torque suppression capability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
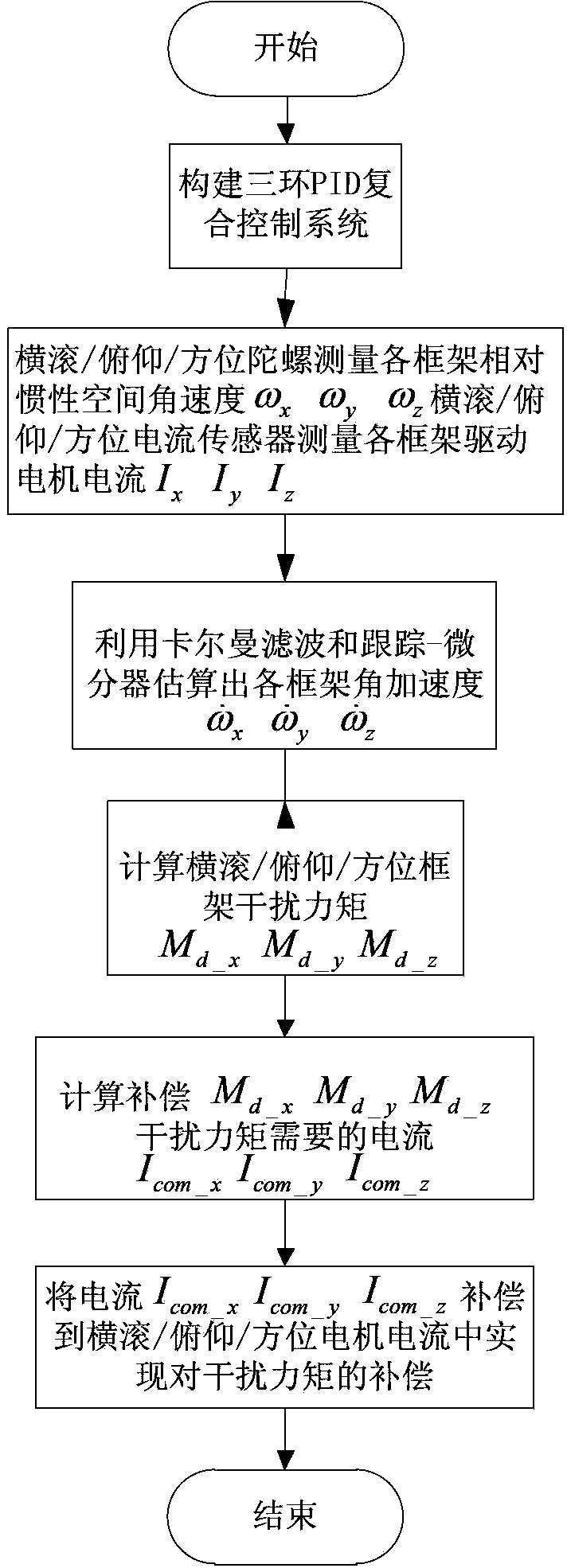
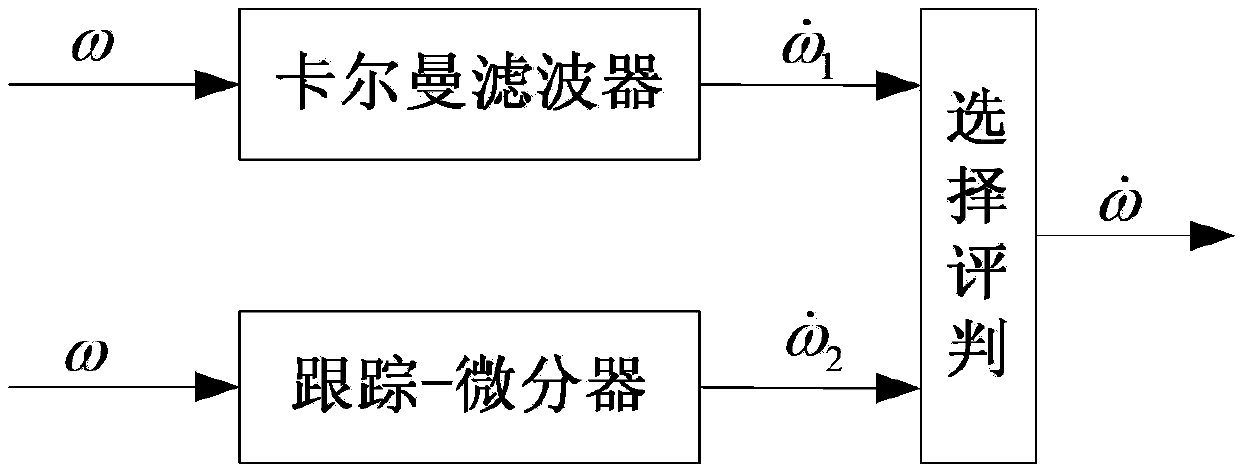
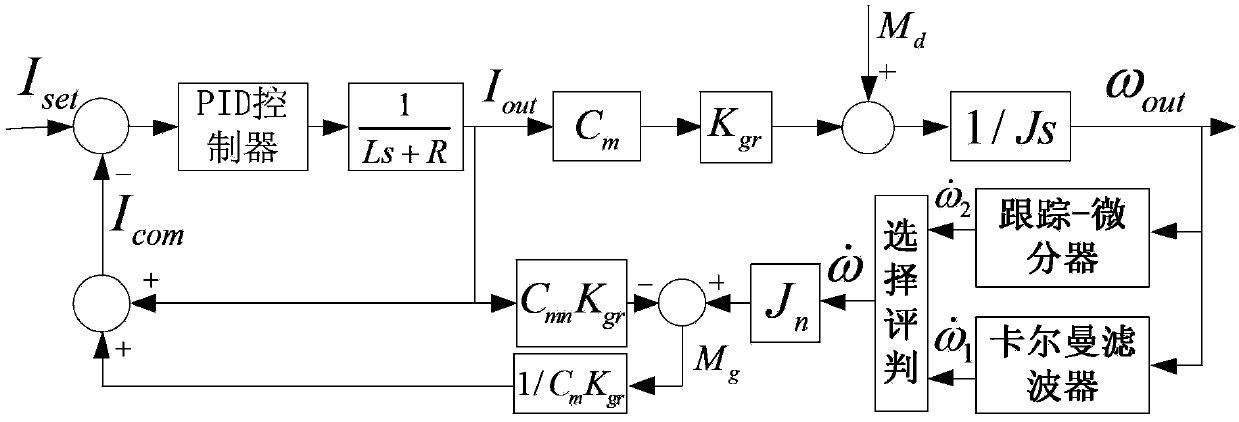
[0062] Such as figure 1 , figure 2 and image 3 Shown, the concrete implementation method of the present invention is as follows:
[0063] (1) To establish a three-ring PID compound control system for an aviation remote sensing three-axis inertial stabilization platform, the steps are as follows:
[0064] (11) Establish a current loop PID feedback loop;
[0065] The output of the stable loop is used as the current given value I of the current loop set , the current sensor in the motor power drive circuit outputs the frame motor current value as the current feedback value I of the current loop fb , the error value of the two is used as the input of the current loop PID controller, and the output value of the current loop PID controller is used as the input frame motor voltage value to make the frame motor generate a corresponding current value.
[0066] (12) Establish a stable loop PID feedback loop;
[0067] The output of the tracking loop is given as the angular veloci...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More