

Pod stabilized platform control method based on backlash estimation and compensation
A technology of stable platform and control method, applied in transportation and packaging, aircraft parts, etc., can solve problems such as low control accuracy and dynamic performance deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The specific implementation of the method for controlling the pod stabilization platform based on backlash estimation and compensation of the present invention will be described in detail below in conjunction with the accompanying drawings.
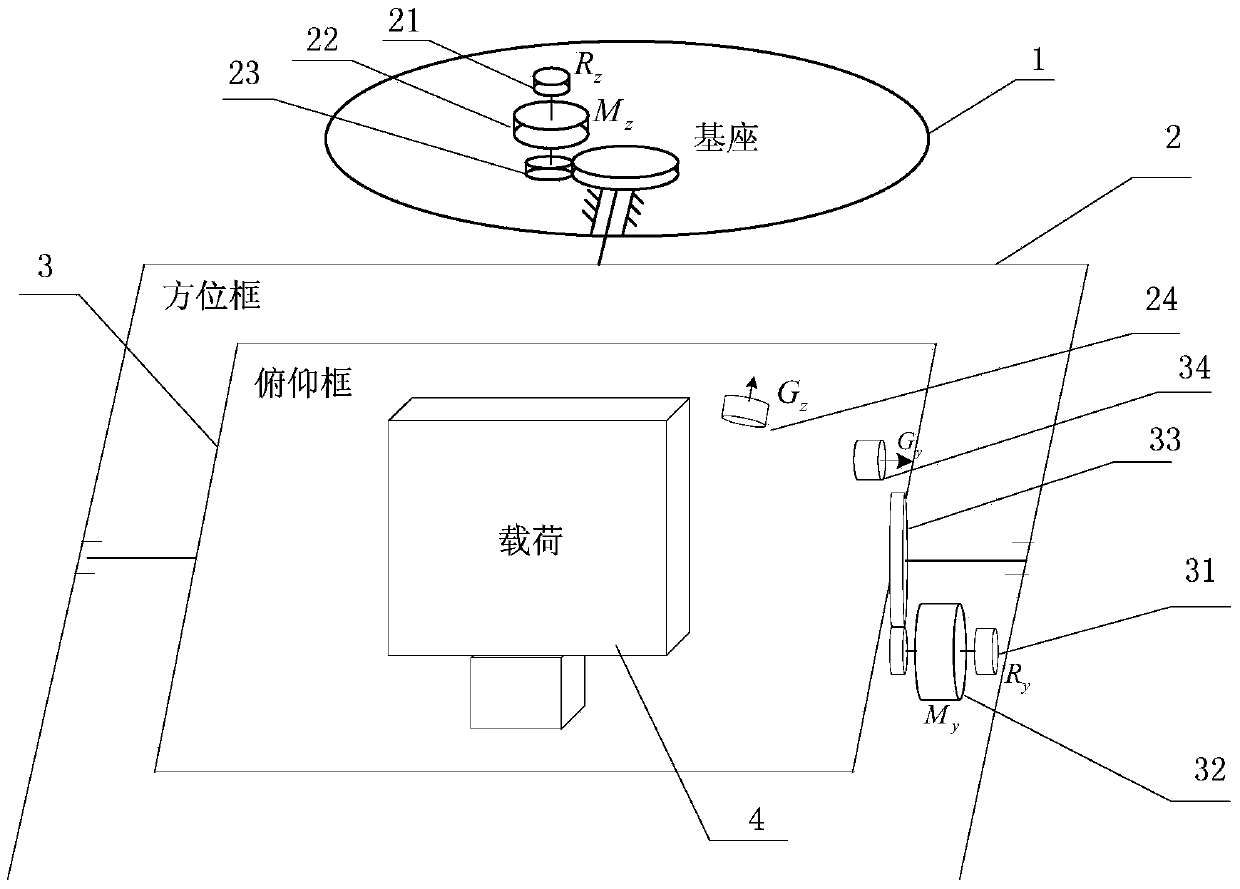
[0016] refer to figure 1 as shown, figure 1 It is a schematic diagram of the work of the pod stabilized platform in the present invention. The pod stable platform mainly includes: the azimuth frame 2 and the pitch frame 3 connected to the base 1, the azimuth frame 2 is connected to the azimuth frame photoelectric code disc 21, the azimuth frame torque motor 22, the azimuth frame gear pair 23, the azimuth frame rate gyro 24, and the The pitch frame photoelectric code disk 31 of the pitch frame 3 , the pitch frame torque motor 32 , the pitch frame gear pair 33 , the pitch frame rate gyro 34 , and the pitch frame 3 carry a load 4 .
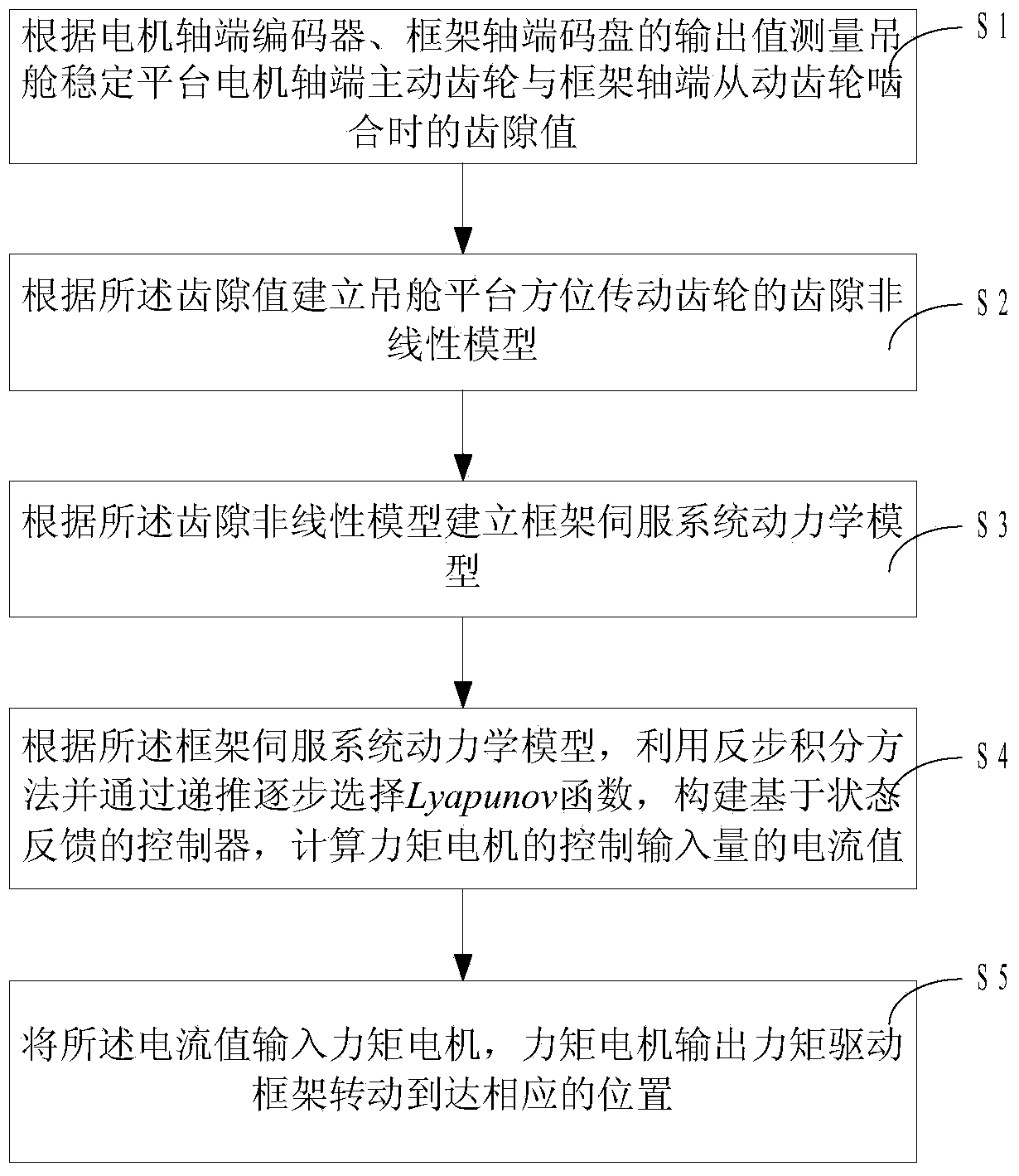
[0017] refer to figure 2 as shown, figure 2 It is a flow chart of the pod-stabilized platform co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More