

Inertial stabilization platform unbalanced disturbance inhibition method
An inertial stable platform, balanced technology, applied in directions such as navigation through velocity/acceleration measurement, can solve the problems of compensation delay, poor performance, limited disturbance suppression effect, etc., to achieve the effect of simplifying the design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
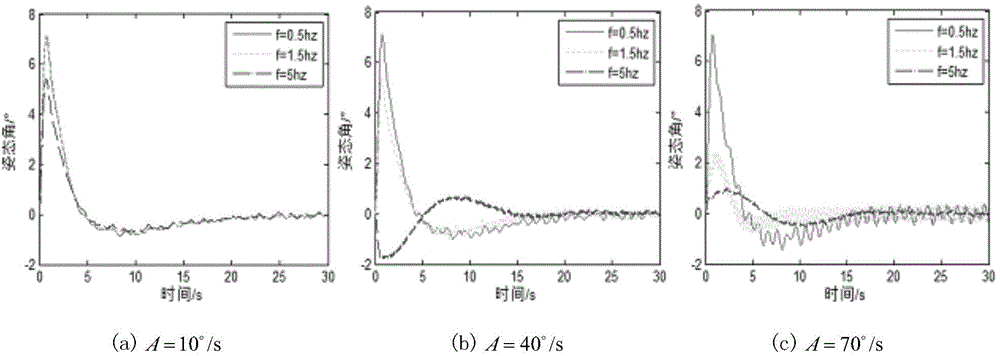
[0020] Under unbalanced disturbance, the angle output of the inertial stable platform based on PID control is as figure 1 As shown, in the range of 0-15 seconds, the angle output will produce a relatively large error, which has greatly exceeded the stable accuracy of the platform. This is because the feedback control compensates for the error after it occurs, and there is a certain time delay . Moreover, under PID control, the steady-state value of the platform angle output is also relatively large, which is difficult to meet the high precision requirements of the system.
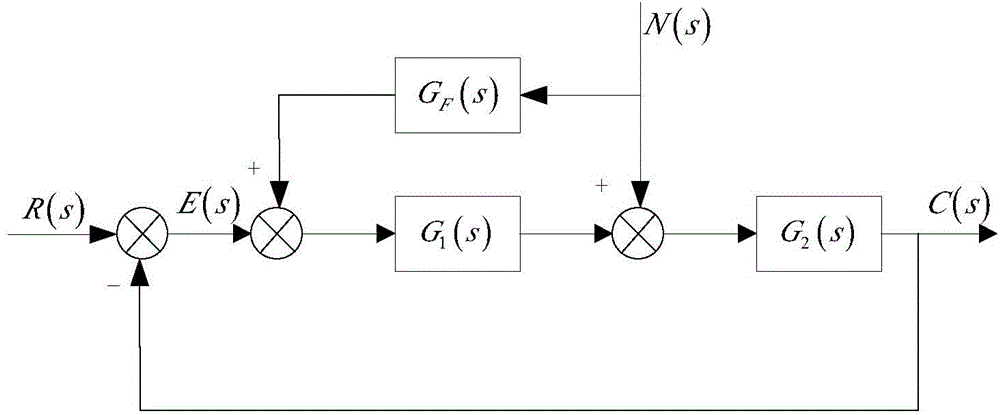
[0021] Feedforward control structure diagram such as figure 2 As shown, the feedforward control can compensate the disturbance before it affects the system, so it can effectively suppress the influence of the measurable disturbance on the system. The output of the system under the action of disturbance N(s) can be expressed as:
[0022] C ( s ) = G 2 ( s ) [ 1 + G 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More