

Self-adaptive pneumatic flexible grabbing mechanical gripper based on metamorphic mechanism
A technology for grasping manipulators and metamorphic mechanisms, which is applied in the field of manipulator claws, can solve problems such as poor implementation, complex control systems, and low reliability, and achieve the effect of fewer drives, simple control, and high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
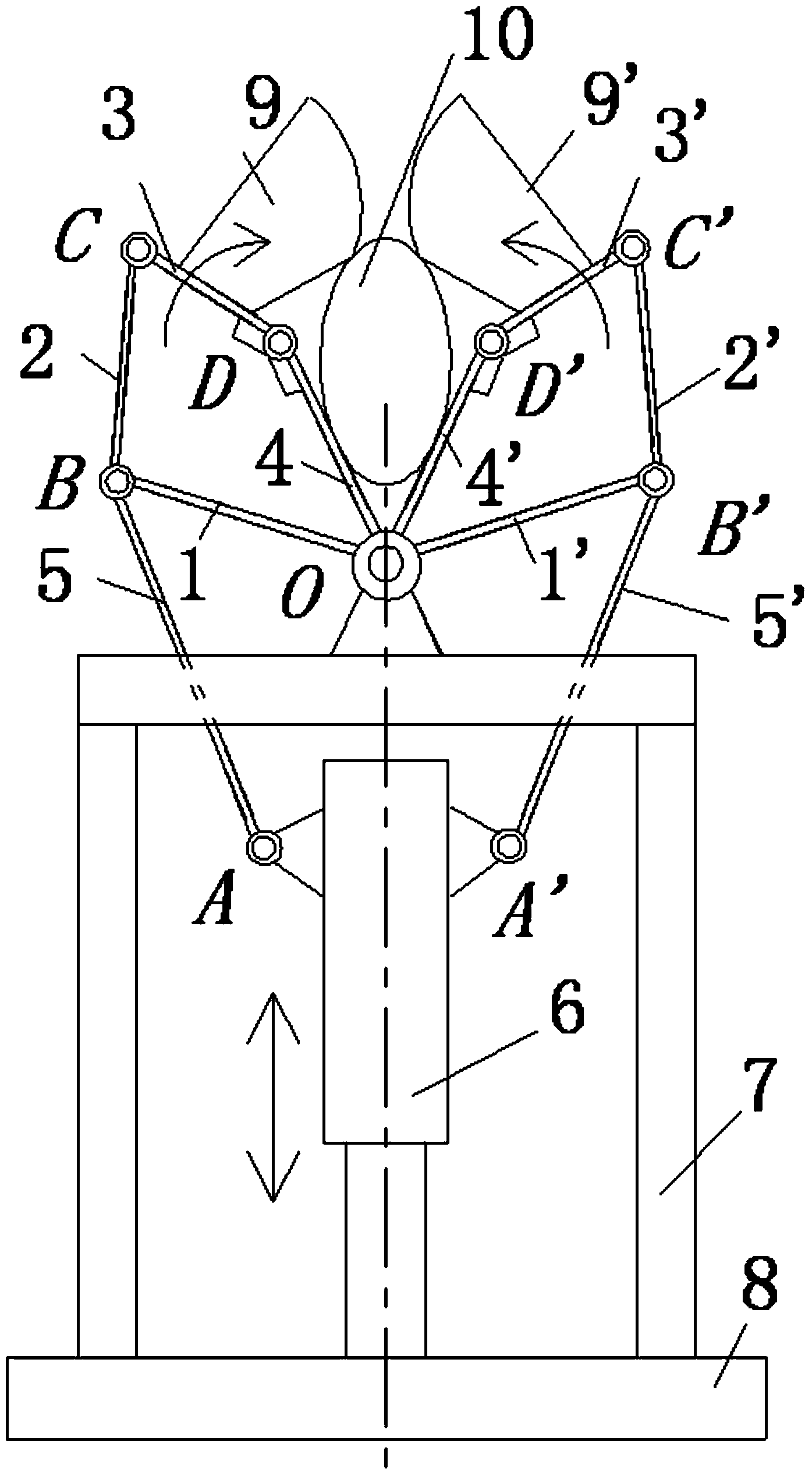
[0010] Such as figure 1 As shown, the self-adaptive pneumatic flexible grasping manipulator based on the metamorphic mechanism of the present invention includes the metamorphic mechanism OBCD, the metamorphic mechanism OB'C'D', the connecting rod 5, the connecting rod 5', the cylinder piston 6, and the bracket 7 , Base 8, chuck 9, chuck 9', workpiece 10. The support 7 is fixedly connected with the base 8, and the cylinder body is fixed on the base and forms a moving pair with the piston 6. The metamorphic mechanism OBCD is a hinged four-bar mechanism formed by connecting the connecting rod 1, the connecting rod 2, the connecting rod 3, and the connecting rod 4 respectively through the rotating pairs B, C, D, and O; the metamorphic mechanism OB' C'D' is a hinged four-bar mechanism formed by connecting rod 1', connecting rod 2', connecting rod 3', and connecting rod 4' respectively through revolving pairs B', C', D', and O; The swivel pair D, D' has a torsion spring and a posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More