

Method, system and computing device for generating high-resolution depth map
A high-resolution, depth map technology, applied in the field of computer vision, can solve problems such as poor display effect and wrong depth data, and achieve the effect of fast calculation speed, wide application value and good display effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
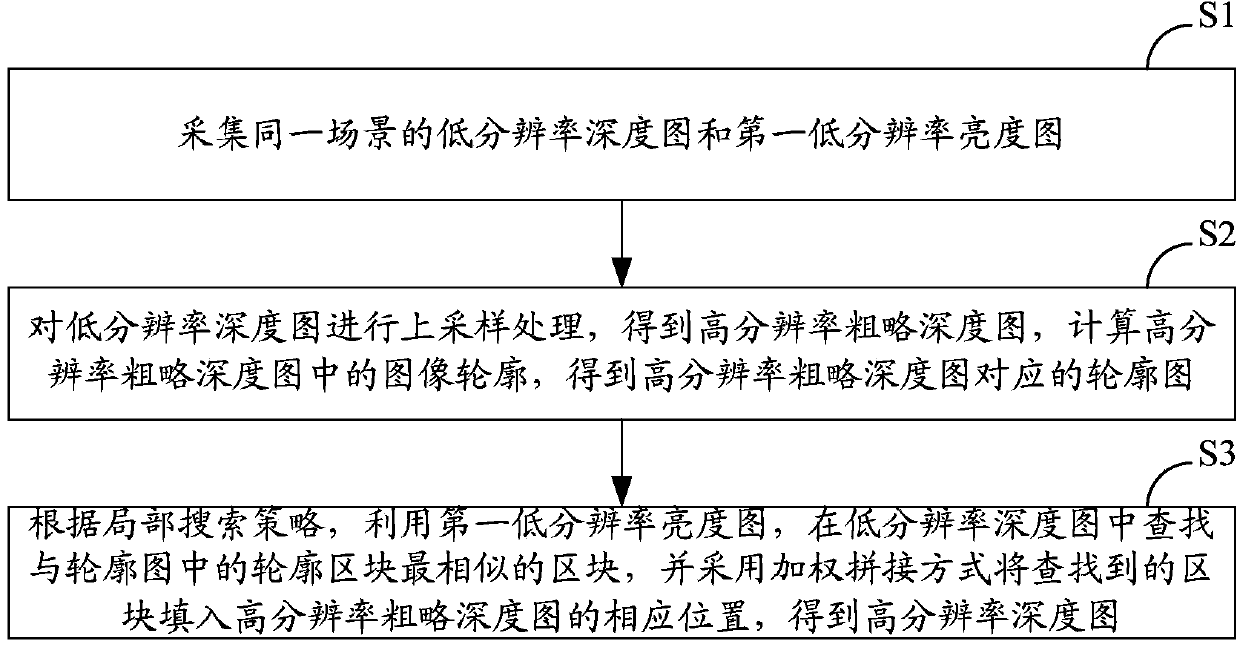
[0031] Embodiment 1 of the present invention proposes a method for generating a high-resolution depth map, such as figure 1 shown, including:
[0032] Step S1: collecting a low-resolution depth map and a first low-resolution brightness map of the same scene, where the size of the first low-resolution brightness map and the low-resolution depth map are the same.
[0033] In Embodiment 1 of the present invention, the existing depth image sensor can be used to realize the collection of the low-resolution depth map and the first low-resolution brightness map. For example, the Microsoft kinect depth image sensor can be used to simultaneously collect the same scene with the same size A low-resolution depth map and a first low-resolution luminance map.
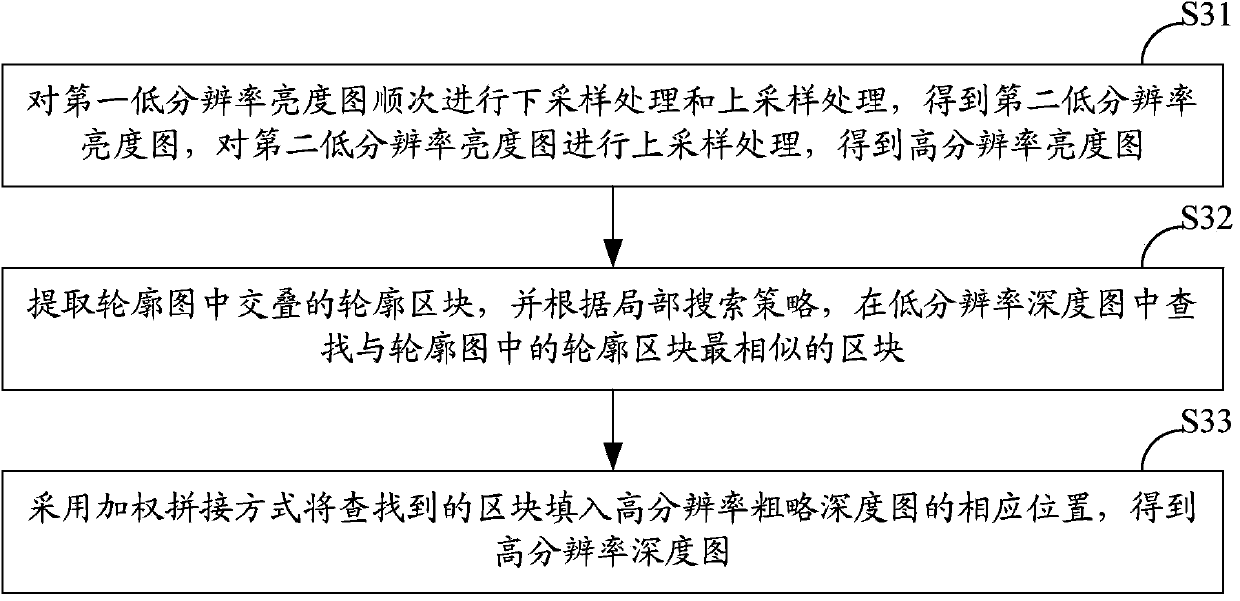
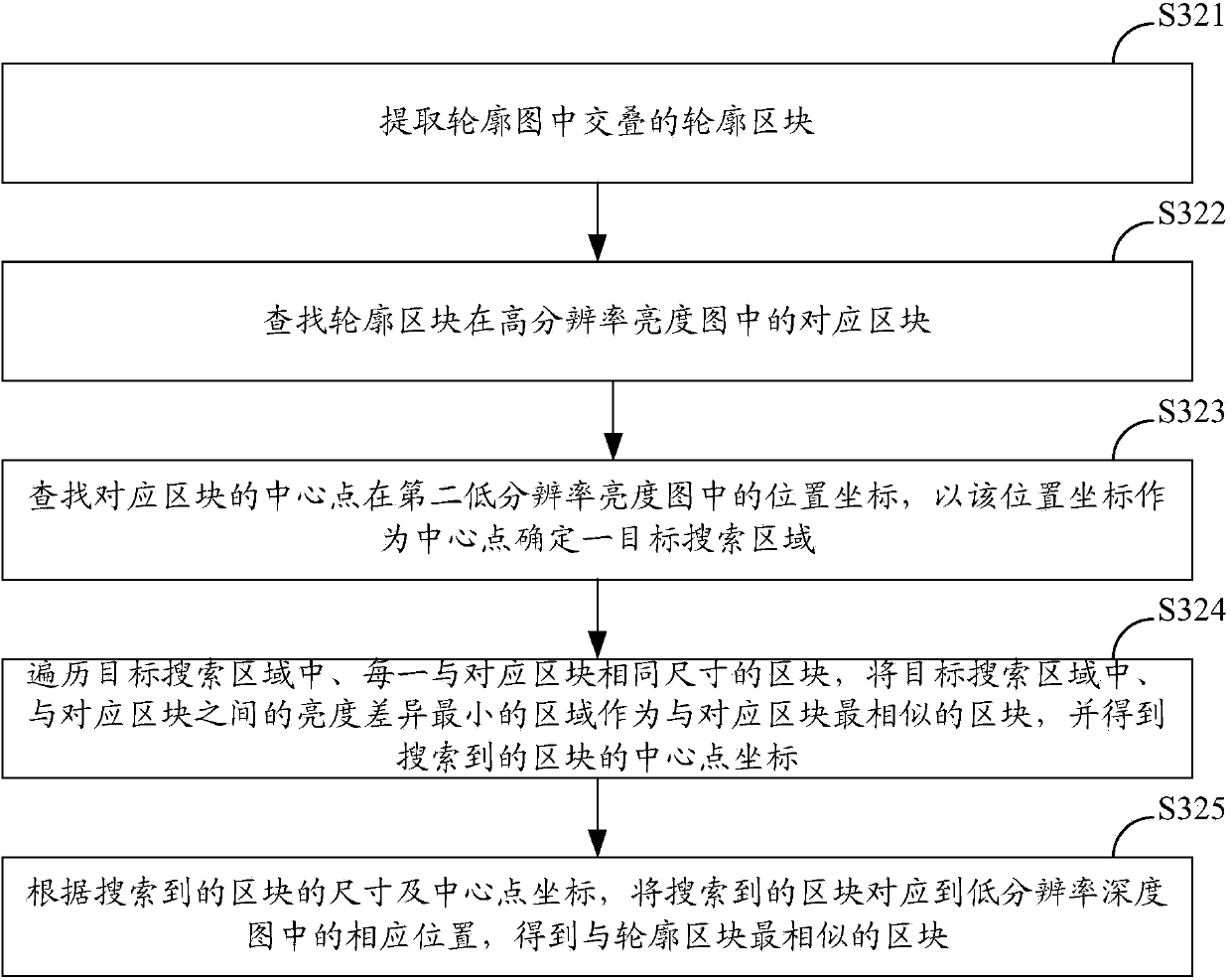
[0034] Step S2: Perform up-sampling processing on the low-resolution depth map to obtain a high-resolution rough depth map, calculate the image contour in the high-resolution rough depth map, and obtain a contour map corresponding t...
Embodiment 2
[0064] Embodiment 2 of the present invention proposes a system for generating a high-resolution depth map, such as Figure 5 As shown, for ease of description, only the part related to Embodiment 2 of the present invention is shown.
[0065] In detail, the system for generating a high-resolution depth map proposed in Embodiment 2 of the present invention includes: an image acquisition module 1, configured to acquire a low-resolution depth map and a first low-resolution brightness map of the same scene, and the first low-resolution The size of the high-resolution brightness map is consistent with the size of the low-resolution depth map; the first image processing module 2 is used to perform up-sampling processing on the low-resolution depth map to obtain a high-resolution rough depth map, and calculate the high-resolution rough depth map. Image contour, obtain the contour map corresponding to the high-resolution rough depth map, the size of the high-resolution rough depth map ...
Embodiment 3
[0073] Embodiment 3 of the present invention proposes a computing device, including the system for generating a high-resolution depth map as described in Embodiment 2 above, which will not be repeated here.
[0074] In summary, the method and system for generating a high-resolution depth map proposed by the present invention is to convert the low-resolution depth map into a high-resolution rough depth map by using an upsampling algorithm, and then further obtain the high-resolution rough depth map The contour map of the contour map, and then use the low-resolution brightness map to find the block that is most similar to each overlapping contour block in the contour map in the low-resolution depth map, and then use the weighted splicing method to fill the found blocks. Input the corresponding position of the high-resolution coarse depth map to obtain the high-resolution depth map. Compared with the existing technology, after the high-resolution rough depth map is obtained, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More