Avoidance path planning method based on closest distance vector field histogram
A shortest distance, path planning technology, applied in two-dimensional position/channel control and other directions, it can solve the influence of sensing uncertainty, it is difficult for the robot to complete the predetermined trajectory, and it is difficult to find the potential function of concave obstacles, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Hereinafter, the present invention will be described in detail with reference to the drawings and examples. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
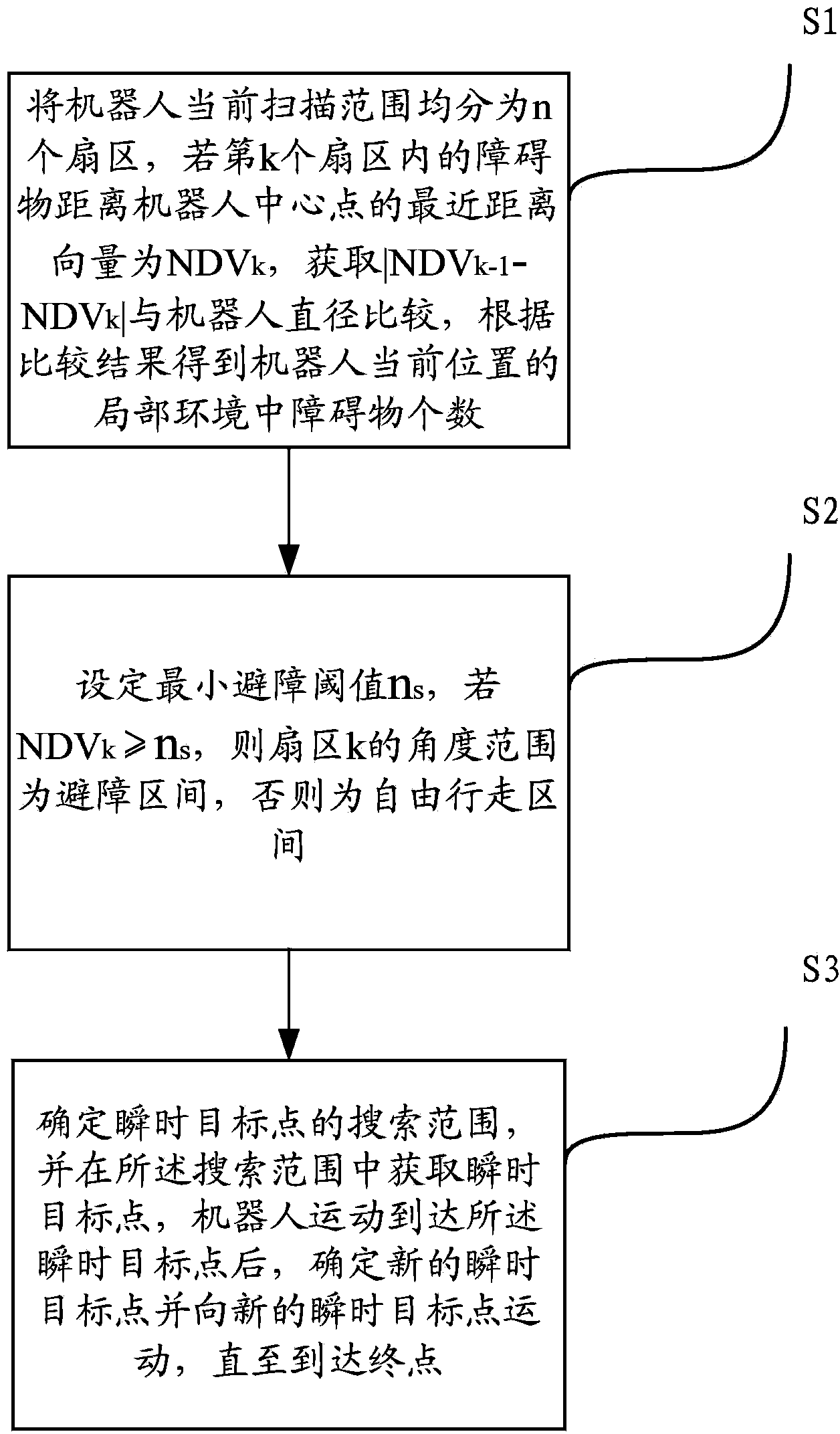
[0040] figure 1 It is a flow chart of the obstacle avoidance path planning method based on the shortest distance vector field histogram provided by the present invention. like figure 1 As shown, the obstacle avoidance path planning method based on the shortest distance vector field histogram provided by the preferred embodiment of the present invention includes steps S1-S3.
[0041] Step S1: Divide the current scanning range of the robot into n sectors, if the shortest distance vector between the obstacle in the kth sector and the center point of the robot is NDV k , Get|NDV k-1 -NDV k |Compared with the diameter of the robot, the number of obstacles in the local environment of the robot's curre...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap