

A view-independent calibration method for somatosensory camera network
A technology of somatosensory cameras and calibration methods, which is applied in image analysis, image data processing, instruments, etc., can solve problems such as large amount of calculation, and achieve the effect of strong real-time performance and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
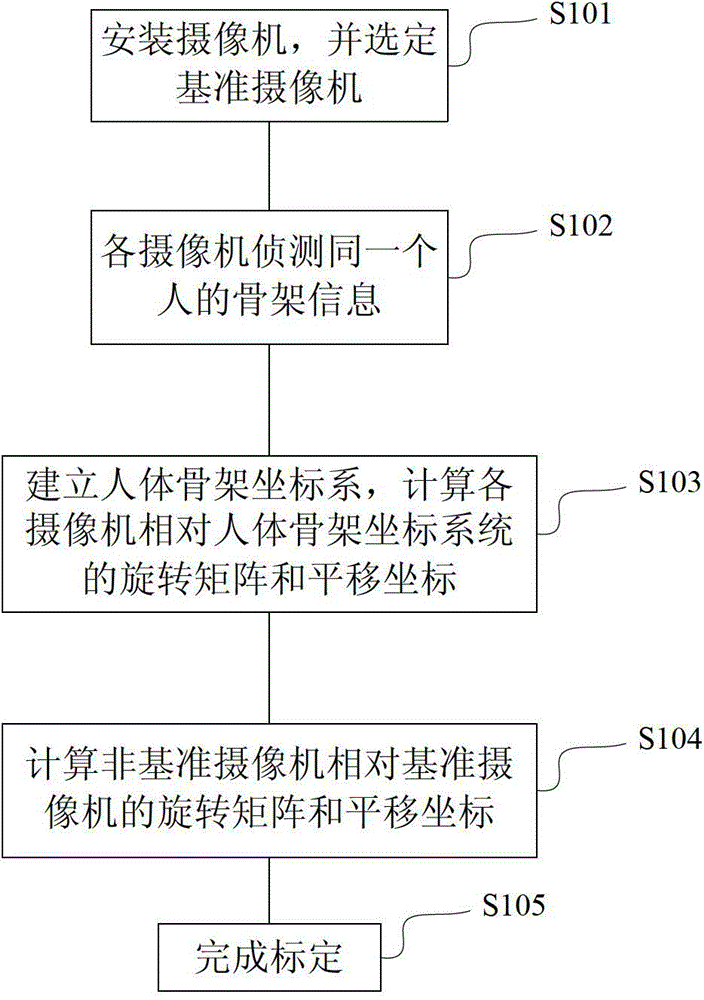
[0029] Such as figure 1 As shown, a view-independent somatosensory camera network calibration method aims at fast and robust calibration of the somatosensory camera network, and proposes to use the robust skeleton joint points of the human body as reference points to construct a view-independent human skeleton coordinate system, and adopts a coordinate-based It is realized by the method of system conversion. The method includes the following steps:
[0030] In step S101, among the multiple installed cameras, the coordinate system where one camera is located is selected as the reference coordinate system, and the rest are non-reference coordinate systems. In this embodiment, two cameras are assumed to be A and B, and selected The coordinate system where camera A is located is the reference coordinate system;
[0031] In step S102, two cameras acquire and display the skeleton position information of the same person at the same time;
[0032] In step S103, a human skeleton coo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More