

A Nominal Controller-Based Neural Network Fully Adjusted Control Method
A neural network and control method technology, applied in the control field of micro gyroscopes, can solve problems such as low robustness, system instability, and inconvenience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] In order to further explain the technical means and effects that the present invention adopts to achieve the intended purpose of the invention, below in conjunction with the accompanying drawings and preferred embodiments, the details of a neural network full-adjustment control method based on a nominal controller proposed according to the present invention will be described. Embodiments, structures, features and effects thereof are described in detail below.
[0071] The control method of the neural network full adjustment based on the nominal controller of the present invention comprises the following steps:
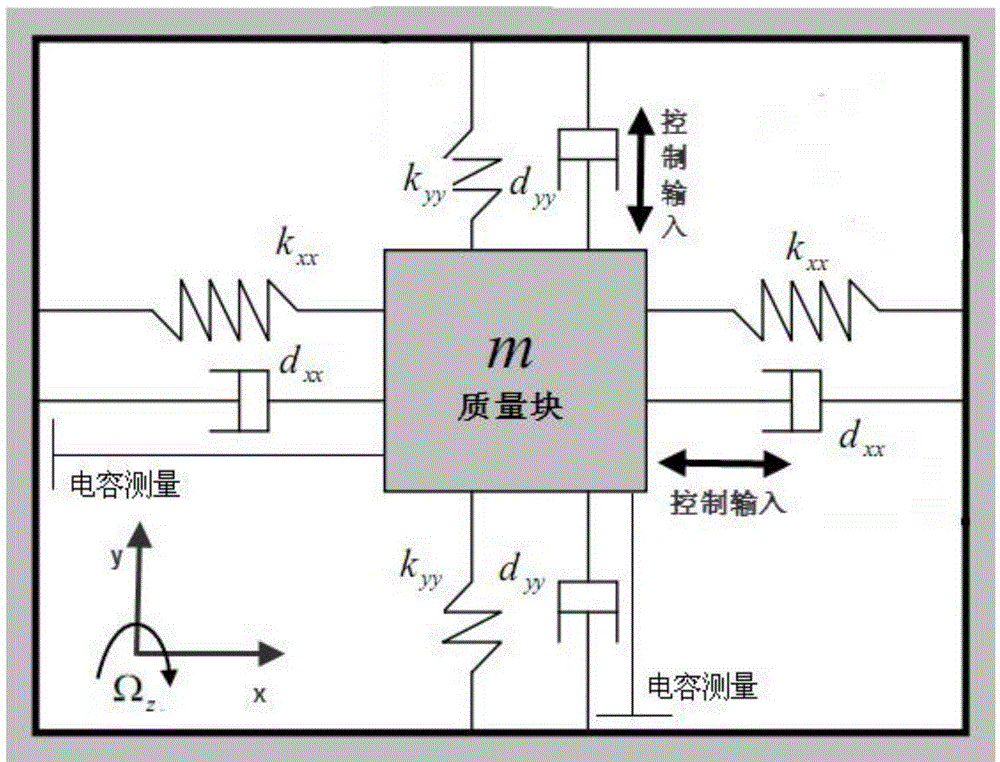
[0072] (1) Establish a non-dimensional dynamic model of the micro-gyroscope
[0073] Considering the manufacturing error and external interference, the dynamic equation of the micromechanical gyroscope is:
[0074] m x · · ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More