

Ultra-fast exploring controller of two-wheel micro-mouse based on dual processors
A microcomputer mouse and controller technology, applied in program control, computer control, general control system, etc., can solve the problems of misjudgment in the exploration of the surrounding maze, serious heating of the body, and inability to satisfy rapid exploration, etc., to improve stability and dynamics performance, improving computing speed and accuracy, and avoiding excessive aging effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The technical solutions in the embodiments of the present invention will be described clearly and completely below. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
[0050] See Figure 1 to Figure 8 , The embodiment of the present invention includes:
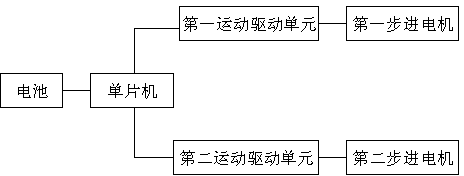
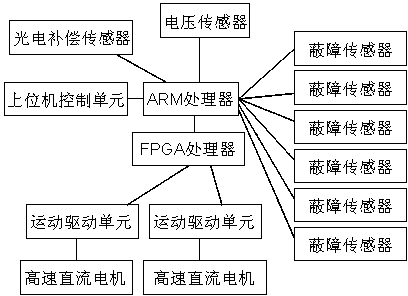
[0051] An ultra-fast exploration controller based on a dual-core two-wheel microcomputer mouse, which is applied to a two-wheel microcomputer mouse. The exploration controller includes an ARM processor, an FPGA processor, a barrier sensor, two motion drive units and two motors, The ARM processor is electrically connected to each of the barrier sensors to receive a signal to determine whether there is an obstacle in front or on both sides, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More