[0006] 1. Due to the large increase in the number of mazes to be solved, the original microcomputer mouse maze-solving technology cannot be used to solve the existing complex mazes of Picomouse, and cannot provide an optimal sprint path for high-speed sprinting
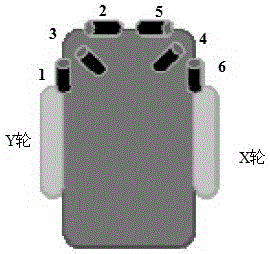
[0007] 2. Since the size of the pico mouse is greatly reduced compared with that of the
micro computer mouse, if the pico mouse uses figure 1 The six sets of sensors of Zhongwei
computer mouse make the sensors interfere with each other when the pico mouse updates the complex maze for the second time, which leads to the failure of pico mouse to read and update the maze information when sprinting at high speed
[0008] 3. The wheel-based picomouse can only passively adapt to the slippery degree of the maze floor. With the increase of the sprint speed of the picomouse, its slipping probability also increases greatly, resulting in failure to solve the maze
[0009] 4. Because the microcomputer mouse
servo system uses relatively low-level algorithms, if these algorithms are directly applied to the Weimouse, it will generally take a long time for the Weimouse to sprint in the maze, which makes it difficult to compete in real competitions. can't win in
[0010] 5. Due to the reduction in the size of the maze wall, the single-
cell running distance of the Pico Mouse is reduced compared with that of the
Micro Computer Mouse. The frequent braking and starting of the Pico Mouse during high-speed sprinting increases the
workload of the single-
chip microcomputer. A single single-
chip computer cannot meet the needs of the Pico Mouse. Rat quick sprint start and stop requirements
[0011] 6. Due to the influence of the capacity of the single-
chip microcomputer, the existing microcomputer mice basically only have two power driving wheels, and use the two-wheel differential mode to drive, which makes the system have higher requirements for the two-axis
servo, especially when the
linear acceleration sprint navigation, It is required that the speed and acceleration should be strictly consistent, otherwise the straight-line navigation will fail, and using the existing microcomputer mouse directly for the PicoMouse will easily cause the PicoMouse to hit the wall
[0012] 7. For a two-
wheel drive microcomputer mouse, it is generally required that the PWM control signals of the two motors driving its motion should be synchronized. Due to the limitation of computing power, it is difficult for a single single-chip
servo system to meet this condition, so the single-chip servo technology is directly applied. On Weishu, it is difficult for Weishu to walk accurately on the center line when sprinting on a straight road, and it is easy to hit the left and right maze walls when sprinting at high speed, resulting in the failure of the sprint task
[0013] 8. When the two-
wheel drive system is accelerating, the center of gravity shifts backward, making the front part light and floating. Even on a good road, Weishu will slip, which may lead to the phenomenon of hitting the wall, which is not conducive to the development of high-speed Weishu sprint.
[0014] 9. If the two wheels are improperly designed, the center of gravity will be shifted forward or sideways. When the center of gravity is shifted forward, the
positive pressure on the driving wheel will be reduced, making it easier to slip and go off track during exercise, which will lead to navigation problems. fail
The
lateral deviation of the center of gravity will cause the
positive pressure on the two driving wheels to be different, and the slippage of the two wheels will be inconsistent during the
fast start, and they will deviate from the track in an instant. When turning, the wheel with less
positive pressure may slip, making it difficult to turn
[0015] 10. Two power wheels are used to drive. In order to meet the acceleration and deceleration under complex conditions, the power of a single
drive motor is relatively large, which not only occupies a large space, but also sometimes causes " The phenomenon of "big horse and small
cart" is not conducive to the development of
miniaturization and the saving of system energy
[0016] 11. When the pico mouse is walking in the maze, it is easy to be disturbed by the outside world. Due to the lack of timely compensation, the pico mouse collides with the maze wall. During the operation, once it hits the wall, the motor will stall, causing the motor to have an instantaneous current. ,
burn out the motor in severe cases, and finally fail to complete the task



 Login to View More
Login to View More  Login to View More
Login to View More