

Manipulator based on touch sensor
A tactile sensor and manipulator technology, applied in the field of human-computer interaction, can solve the problems of the unfavorable wide application of tactile sensor arrays, the difficulty of wide application of three-dimensional tactile sensor arrays, errors, etc., and achieve the effect of convenient tactile reproduction and object analysis.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
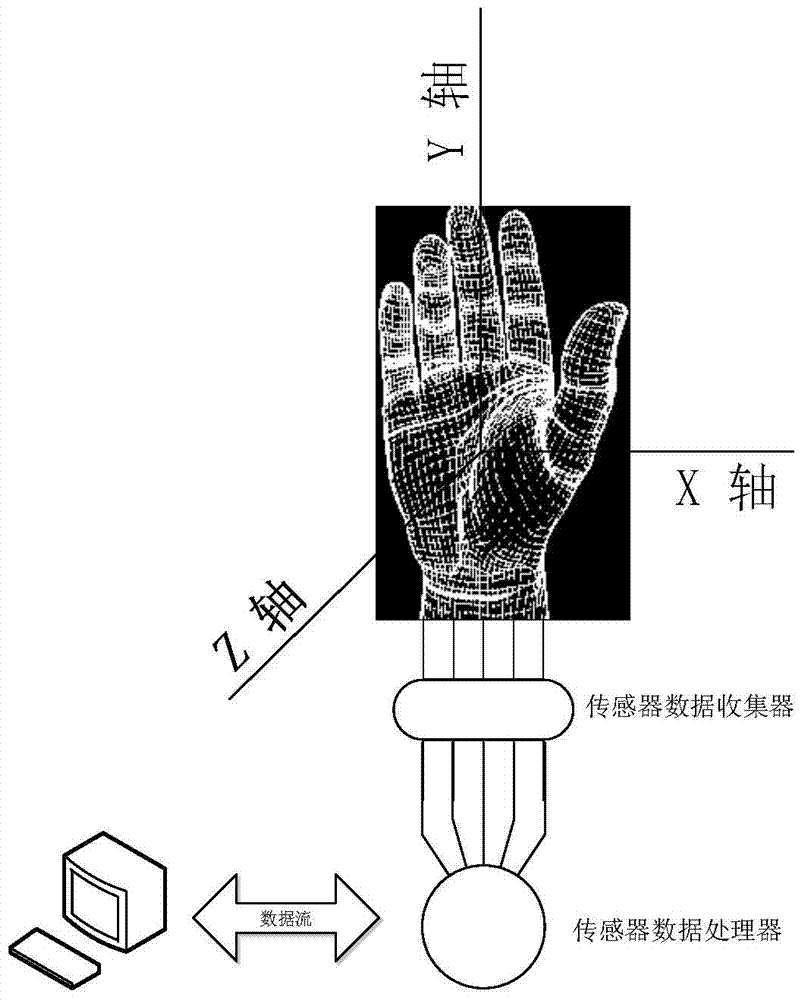
[0023] The purpose of the present invention is to design a manipulator with an integrated tactile sensor array to realize the tactile perception of real objects, and provide a data storage scheme to permanently maintain the relevant tactile senses, pressure senses, sliding senses and other tactile senses of the touched objects information to facilitate subsequent tactile reproduction and object analysis.
[0024] The invention provides a tactile pick-up and tactile...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More