

Relative-distance and tracking coordinate value combination multi-AUV self-locating method
A relative distance and autonomous positioning technology, applied in satellite radio beacon positioning system, positioning, measuring devices, etc., can solve the problems of tracking coordinate value loss of use value, cumulative error, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The preferred embodiments of the present invention will be specifically described below in conjunction with the accompanying drawings.
[0036] The invention specifically realizes an autonomous positioning method of an underwater autonomous vehicle AUV.
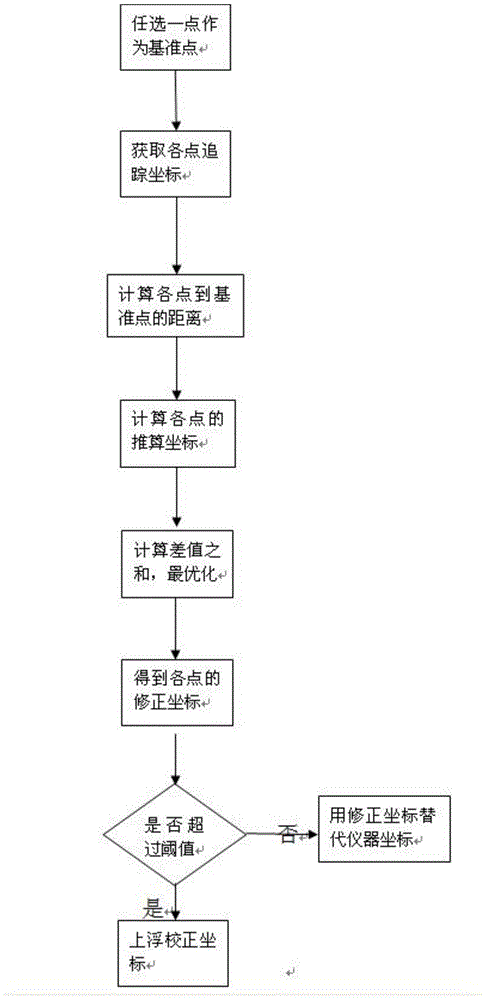
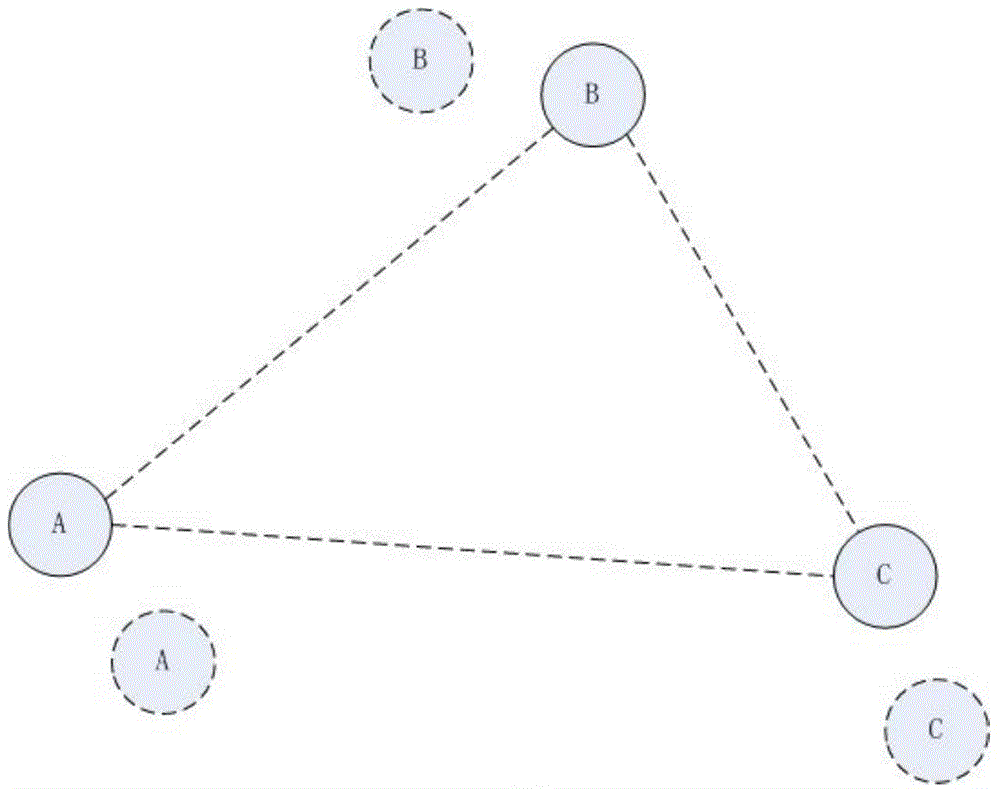
[0037]First, randomly select a point as a reference point, and obtain the tracking coordinates of each point and the distance from each point to the reference point. And use the distance coordinate construction method (RBL-range based localization) to find the estimated coordinates of each point.
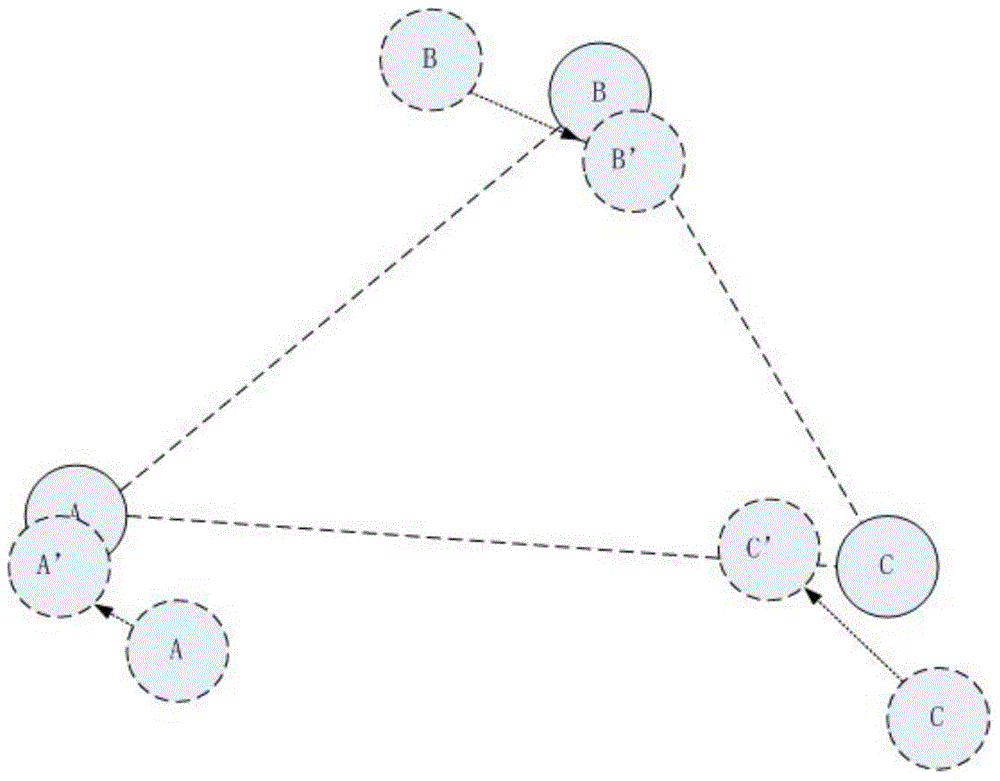
[0038] Secondly, the sum of the differences between the tracking coordinates and the estimated coordinates of each point is calculated, and the sequential quadratic programming optimization algorithm is selected to minimize and optimize the sum of the differences to obtain the corrected coordinates of each point.
[0039] Finally, when the error degree between the corrected coordinate value and the tracking coordinate value...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More