

Service mobile robot navigation method in dynamic environment
A technology of dynamic environment and navigation method, applied in two-dimensional position/channel control and other directions, can solve the problems that restrict the safe and reliable navigation performance of service robots, and it is difficult to improve the overall efficiency of navigation, so as to improve safety, ensure the efficiency of autonomous navigation, The effect of solving the problem of humanized homework
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] Below in conjunction with specific embodiment, further illustrate the present invention, should be understood that these embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various equivalent forms of the present invention All modifications fall within the scope defined by the appended claims of the present application.
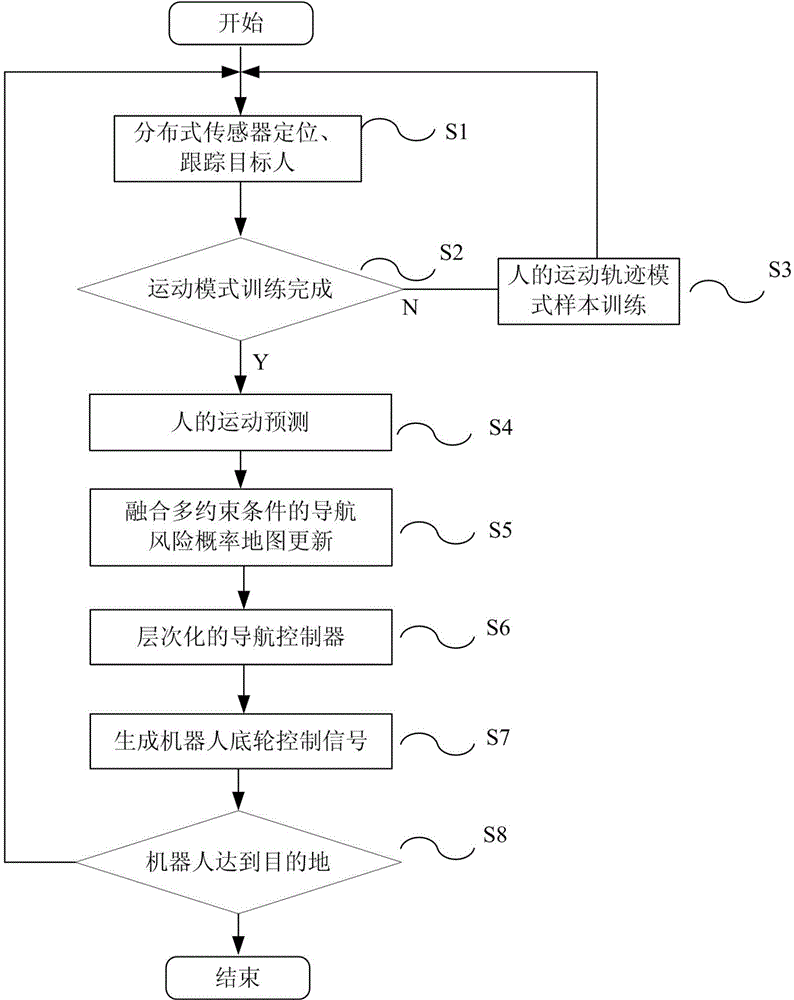
[0047] The method steps of the implementation example of the present invention are:
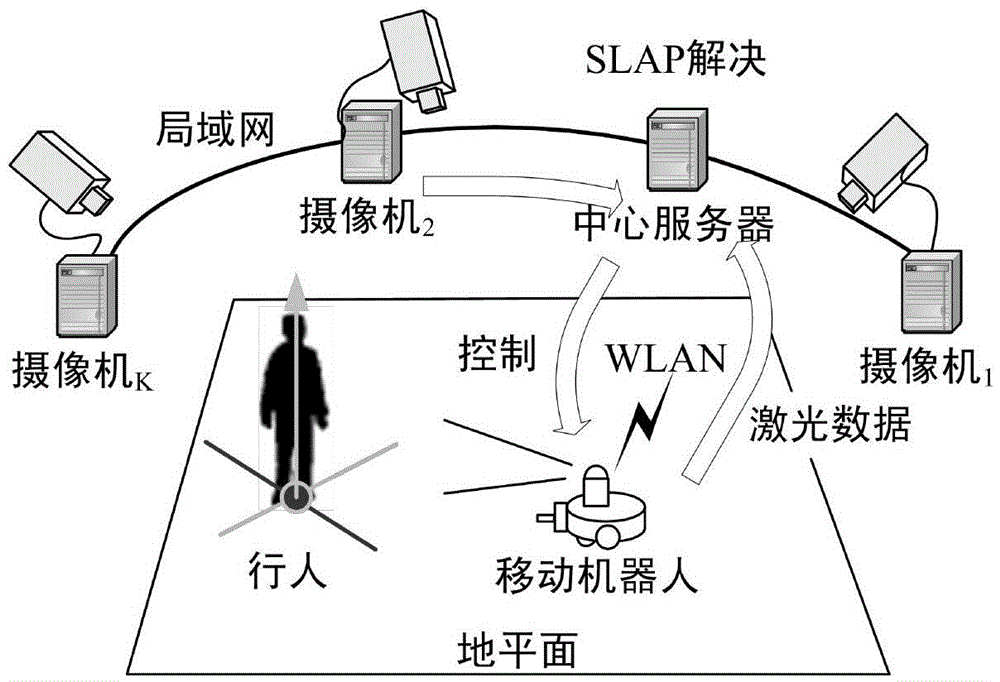
[0048] Using a distributed sensor network composed of multiple global cameras and robot-mounted laser sensors in an indoor environment, the location tracking of dynamic people in the global map is realized;
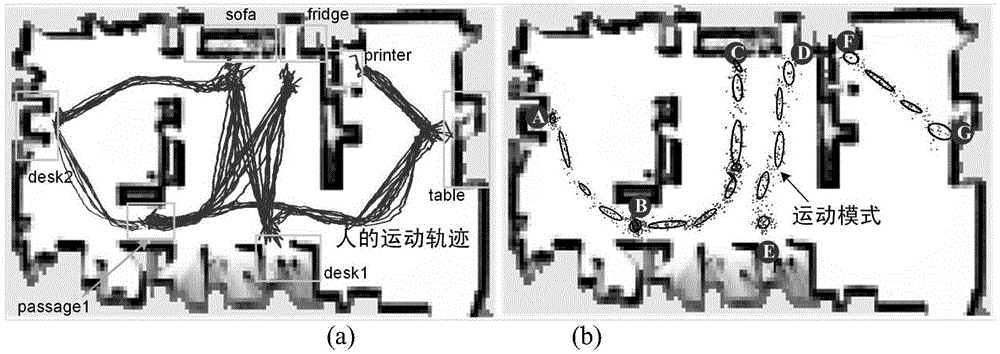
[0049] By collecting long-term human motion trajectories to learn the human motion pattern in a specific indoor environment; and in the navigation process, the robot combines the long-term motion law predict...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More