

Under-actuated artificial limb hand
A prosthetic hand and finger technology, applied in prosthesis, medical science, artificial arm and other directions, can solve the problems of complex structure, heavy weight and large volume of prosthetic hands, and achieve the effect of simple structure, light weight and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings.
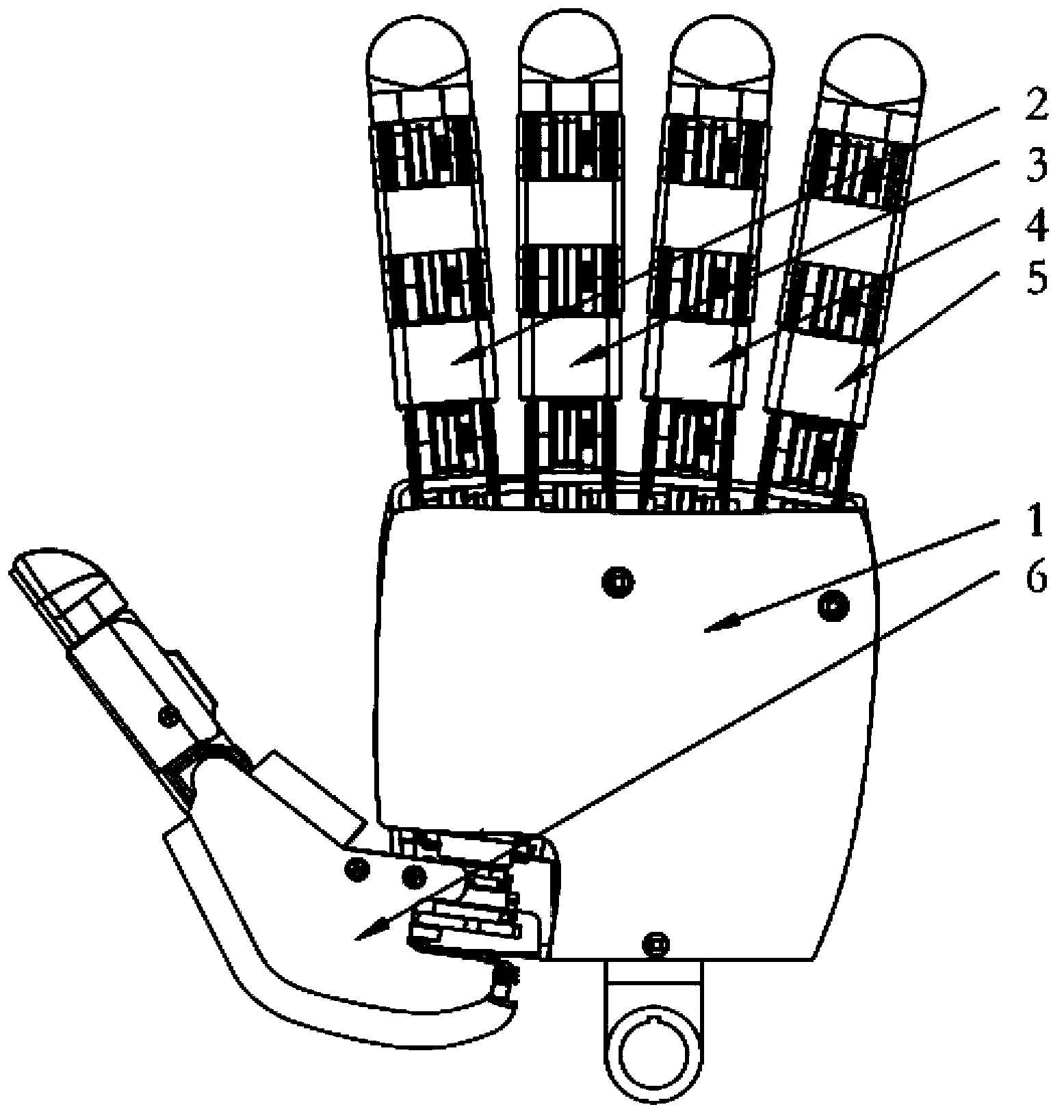
[0046] A kind of prosthetic hand provided by the present invention, such as figure 1 As shown, it is made up of palm 1, index finger 2, middle finger 3, ring finger 4, little finger 5 and thumb 6 from the table, index finger 2, middle finger 3, ring finger 4, little finger 5 and thumb 6 are connected with palm 1 respectively. The structures of the index finger 2 , middle finger 3 , ring finger 4 and little finger 5 are identical, and for the convenience of description, they are represented by fingers hereinafter. The finger is composed of the finger body and the internal transmission mechanism of the finger, and the thumb is composed of the thumb body and the internal transmission mechanism of the thumb. In addition, it also includes an interfinger driving mechanism and a thumb driving mechanism, which drive the finger action and the thumb action respectively.
[0047...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More