

Magnetic force suspension robot for operation of overhead high-tension power transmission line
A technology of high-voltage transmission lines and robots, applied in the direction of overhead lines/cable equipment, holding devices with magnetic attraction or thrust, electrical components, etc., can solve problems such as harmful dynamic loads, low cruising speed, harmful friction, etc., and achieve the elimination of harmful Abrasion, increased movement speed, and low cost effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Below by embodiment, in conjunction with accompanying drawing, technical scheme of the present invention is described further in detail:
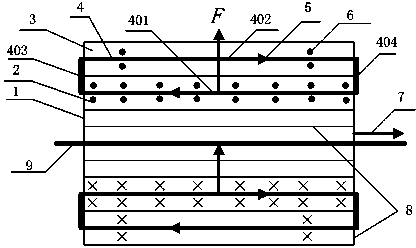
[0040] see figure 1 — Figure 9 , the magnetic levitation method of the robot working on the overhead high-voltage transmission line, the robot can be suspended by using the magnetic field generated by the high-voltage current on the ampere force of the current-carrying wire; The suspension tile 8 is composed of an inner lining tile 1, a magnetic core 2, an outer lining tile 3 and a rectangular coil 4.
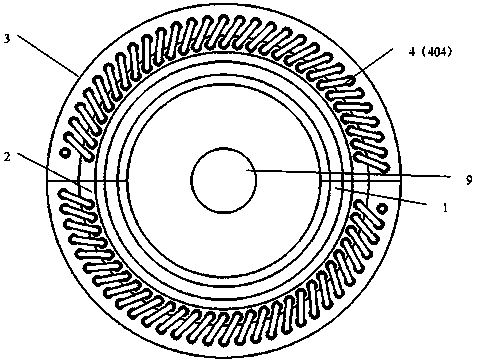
[0041] see Figure 6 and Figure 10 , the inner lining tile 1 is made of weakly magnetically permeable material and is in the shape of a semicircular tube, which is used to protect and support the magnetic core 2. The outer cylindrical surface of the inner lining tile 1 is connected with the inner cylindrical surface of the magnetic core 2; the inner cylindrical surface of the inner lining tile 1 The surface radius is 30mm, the o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More