

Second-order Fourier joint curve non-circular gear pot seedling transplantation seedling-clamping-type seedling pick-up mechanism
A technology of Fourier joints and joint curves, which is applied in the field of second-order Fourier joint curve non-scalloped pot seedling transplanting and clipping seedling picking mechanism, and can solve the problem of non-circular gear irregularity enhancement, Increase the problems of "protruding" seedling needles and inappropriate 8-shaped trajectory to achieve the effect of flexible secondary swing characteristics, compact structure and reliable performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
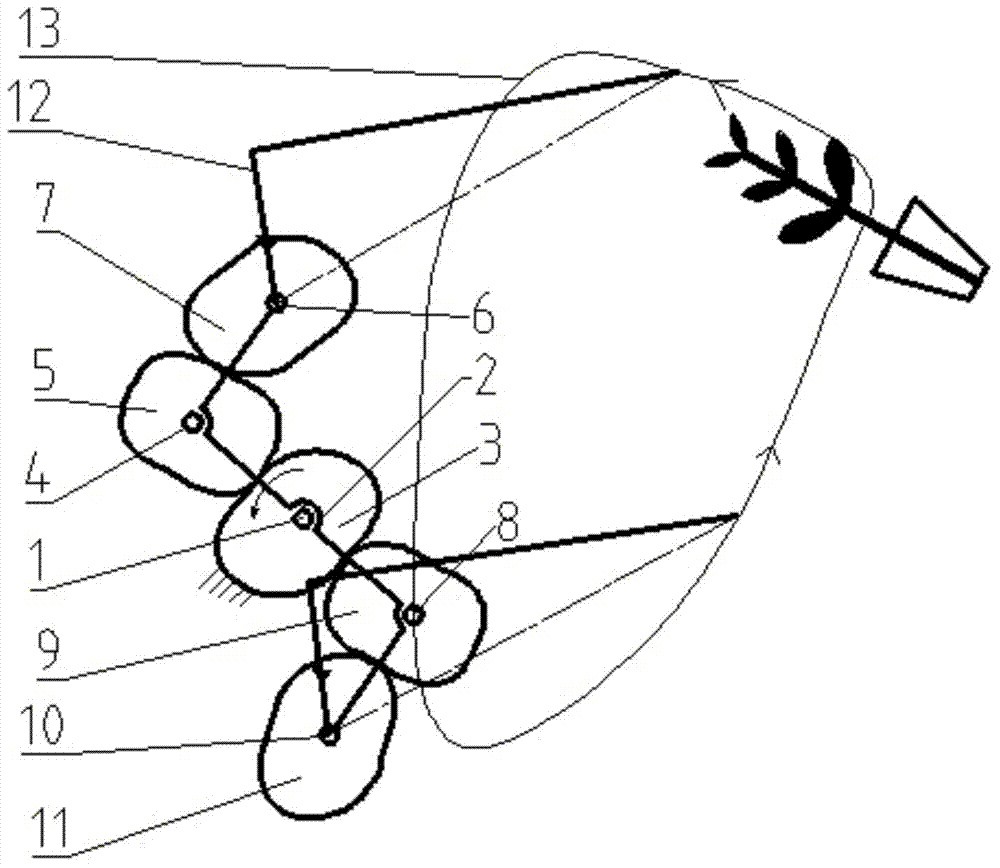
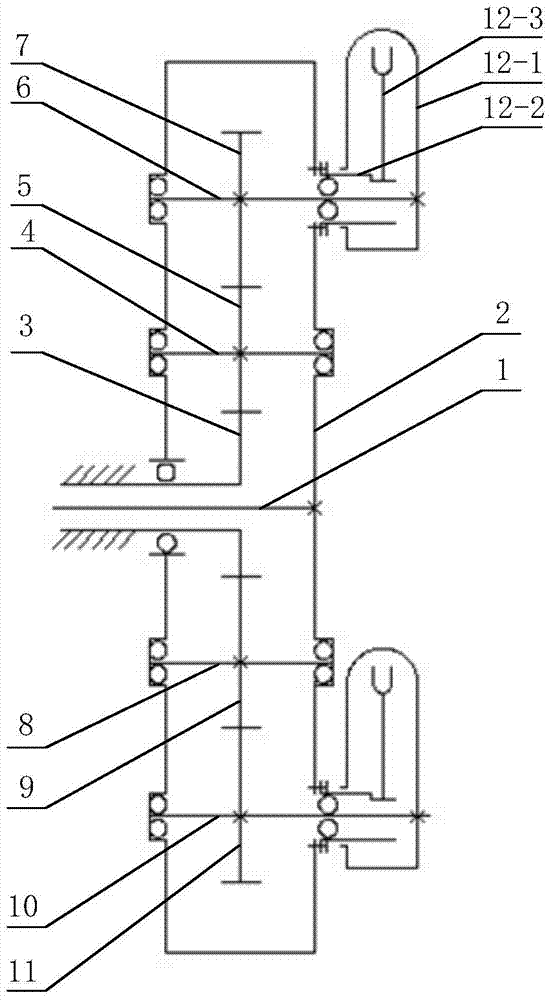
[0023] Such as figure 1 and 2 As shown, the second-order Fourier node curve non-scalloped bowl seedling transplanting clamping seedling picking mechanism includes a central axis 1, a planetary carrier 2, a second-order Fourier center non-circular gear 3, a first intermediate shaft 4, a second First and second-order Fourier intermediate non-circular gear 5, first planetary shaft 6, first and second-order Fourier planetary non-circular gear 7, second intermediate shaft 8, second and second-order Fourier intermediate non-circular gear 9, The second planetary shaft 10, the second second-order Fourier planetary non-circular gear 11 and the seedling claw 12. One end of the central shaft 1 is connected to the power unit, and the other end is fixed to the planet carrier 2; the second-order Fourier center non-circular gear 3 is vacantly sleeved on the central ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More