

Bionic swarm intelligence-based real-time positioning navigation and motion control method and system for moving vehicle
A bionic group and motion control technology, applied in the field of motion control, real-time positioning and navigation of mobile vehicles, can solve the problems of low reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
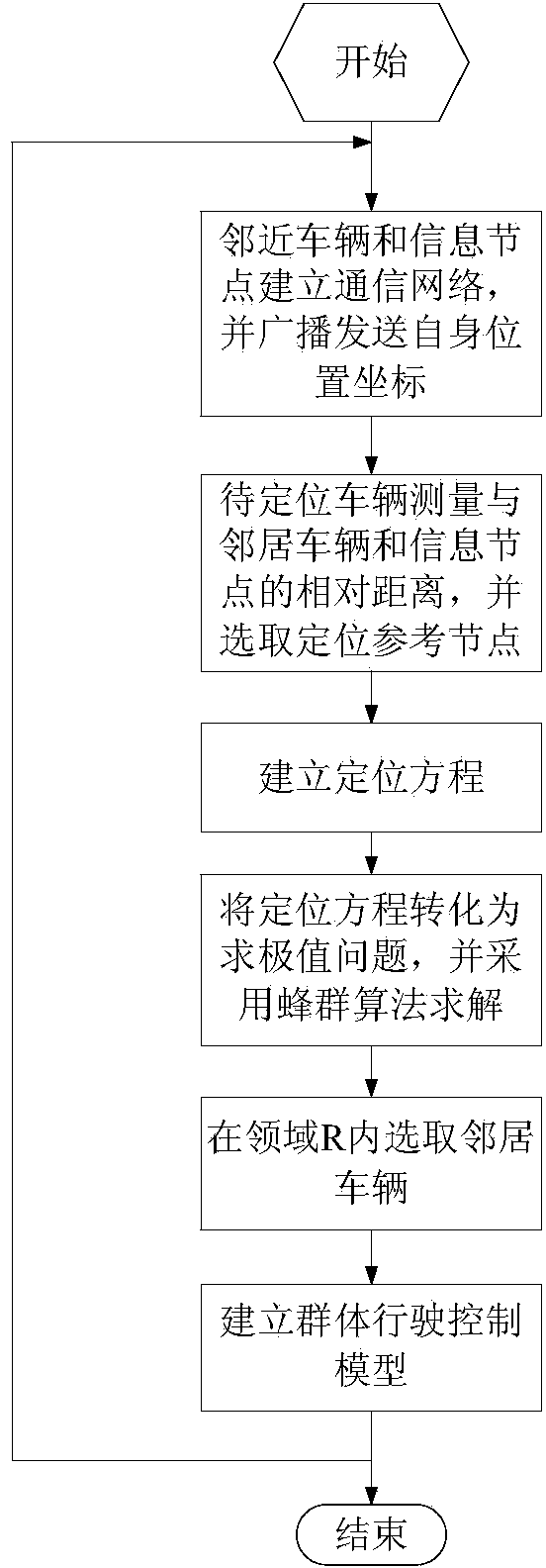
[0047] Example 1. This embodiment describes in detail the steps of the mobile vehicle real-time positioning navigation and motion control method based on bionic swarm intelligence:
[0048] Step 1: At time t, the vehicle V to be positioned and its adjacent vehicles V1, V2, V3, V4, V5, V6 and the information node N1 form a wireless communication network, and the vehicles V1, V2, V3, V4, V5, V6 and the information node The coordinates of N1 are known, and the location coordinates of N1 are broadcast to the vehicle V through the wireless network.
[0049] Step 2: The vehicle V to be positioned receives the location coordinate information sent by the neighbor vehicles V1, V2, V3, V4, V5, V6 and the information node N1, and at the same time measures the distance between itself and the neighbor vehicles V1, V2, V3, The distance d between V4, V5, V6 and information node N1 v1 、d v2 、d v3 、d v4 、d v5 、d v6 、d N1 .
[0050] d i = ct i , i = v1, v2, v3, v4, v5, v6, N1 (1)
...
Embodiment 2
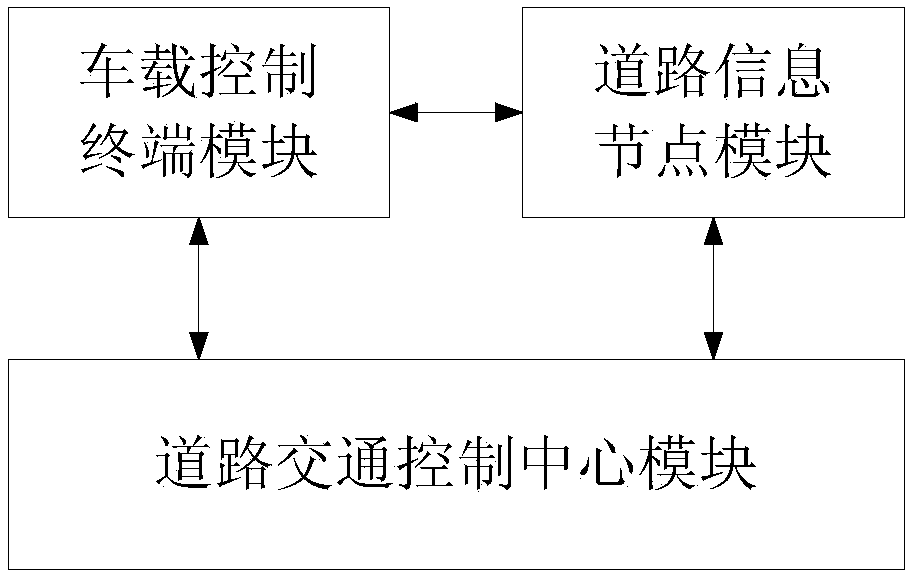
[0070] Example 2. This embodiment describes in detail the structure of the mobile vehicle real-time positioning navigation and motion control system based on bionic swarm intelligence:
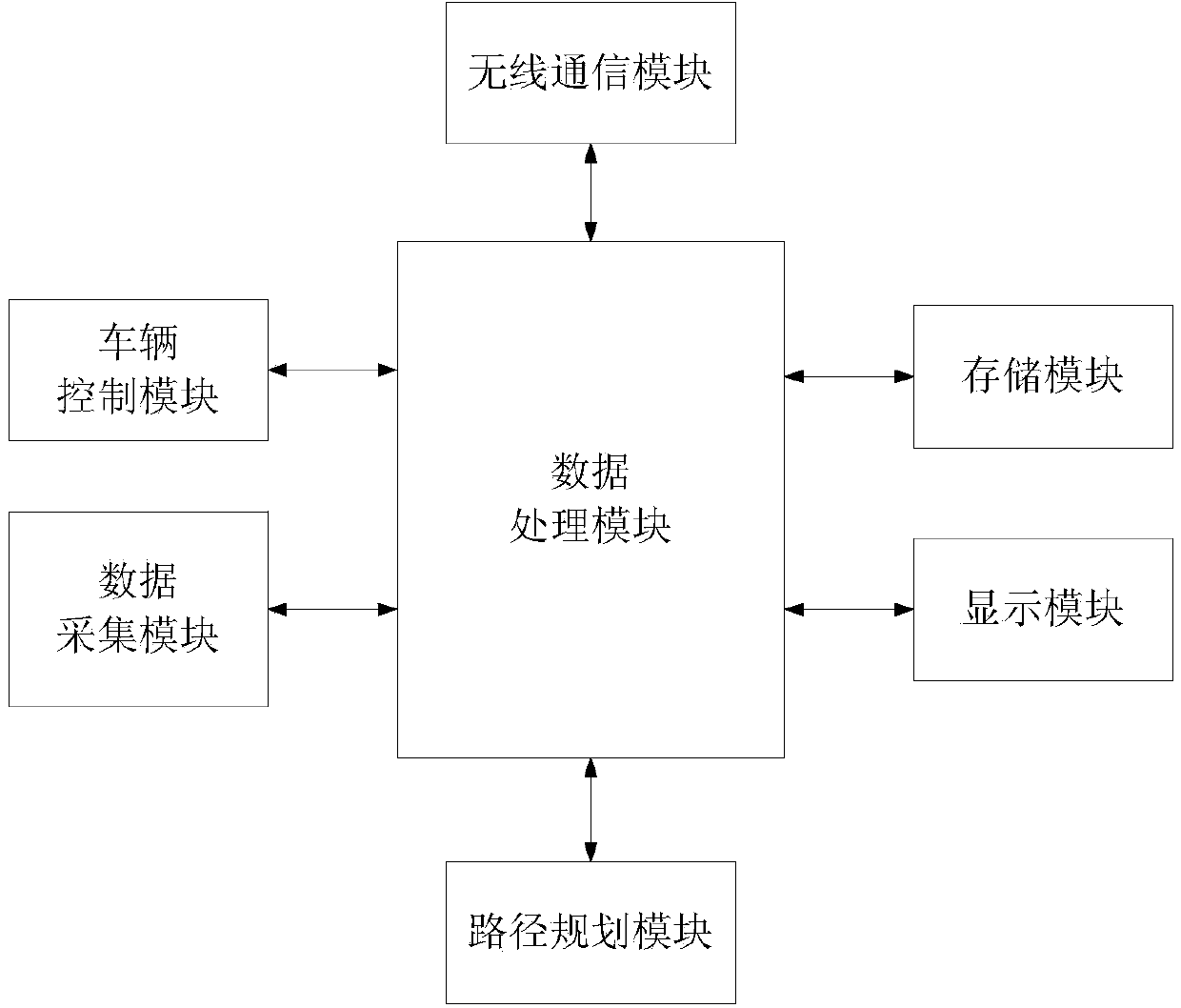
[0071] The data processing module and path planning module in the structure adopt TMS320F2808 chip; the wireless communication module adopts NRF905 chip; the storage module adopts W25X16AVSIG chip; the sensor module includes CCD sensor TSL1401CL, accelerometer LSM303DLHC; the vehicle control module adopts MC9S12XS128MAA chip; the display module is LCD1602 display screen.
[0072] The vehicle control terminal module in the present invention includes: a wireless communication module, a data processing module, a data acquisition module, a vehicle control module, a path planning module, a storage module and a display module. The data processing module obtains the parameters required for positioning from the wireless communication module, establishes a positioning equation group, and uses the bee ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More