

Jumping robot based on tripping energy-storing-releasing mechanism
A robot, energy storage and release technology, applied in the field of jumping robots, can solve the problems of low utilization rate of spring energy, limited jumping height and low efficiency, and achieve the effects of compact structure, high jumping height and high utilization rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
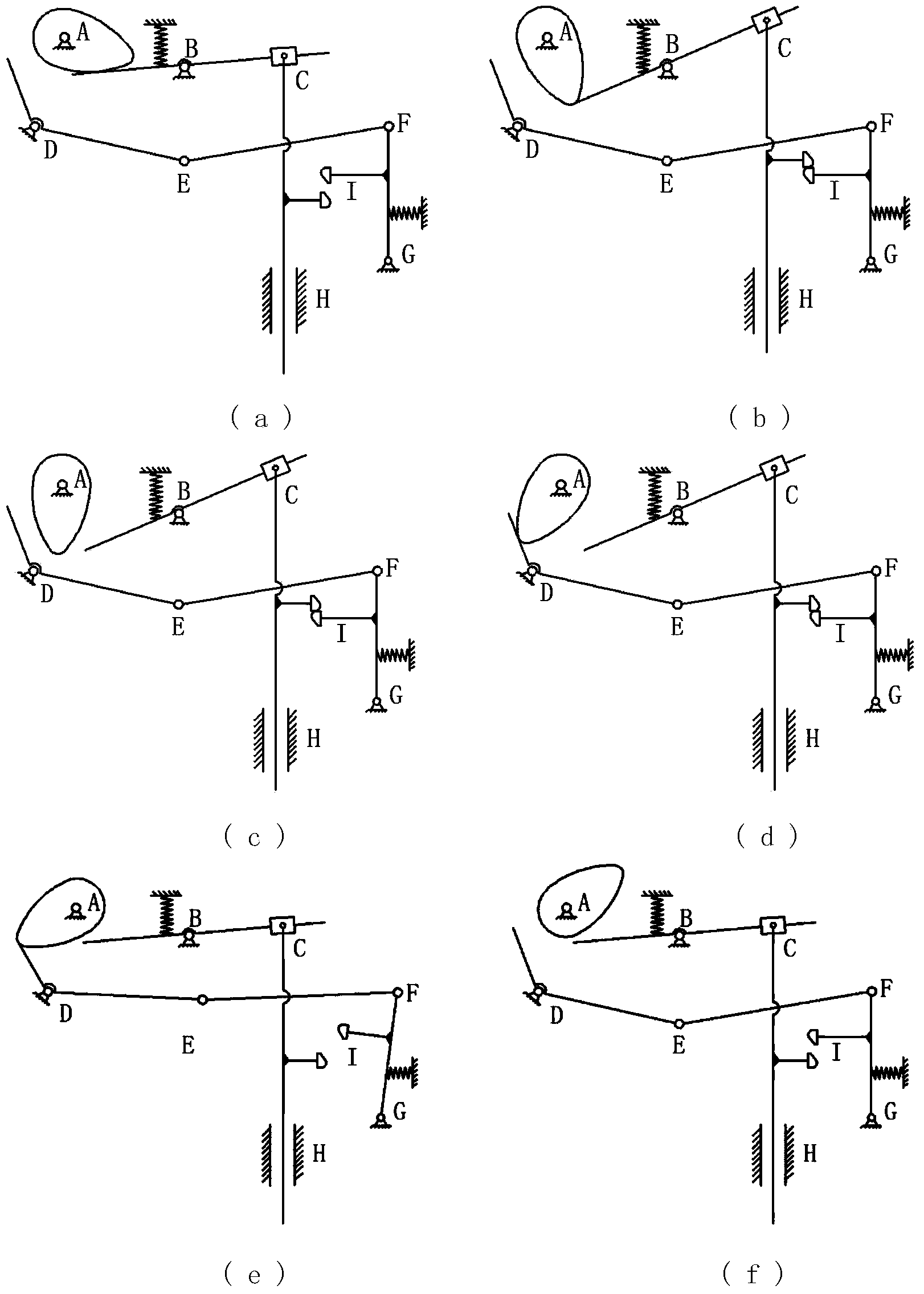
[0030] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
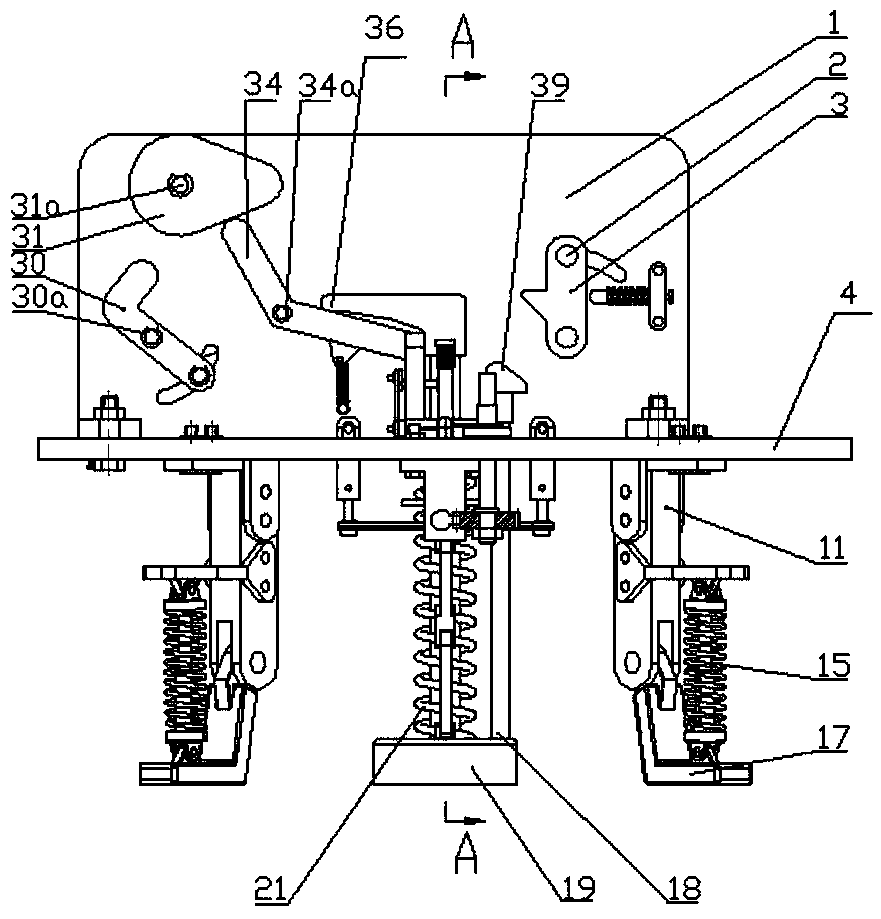
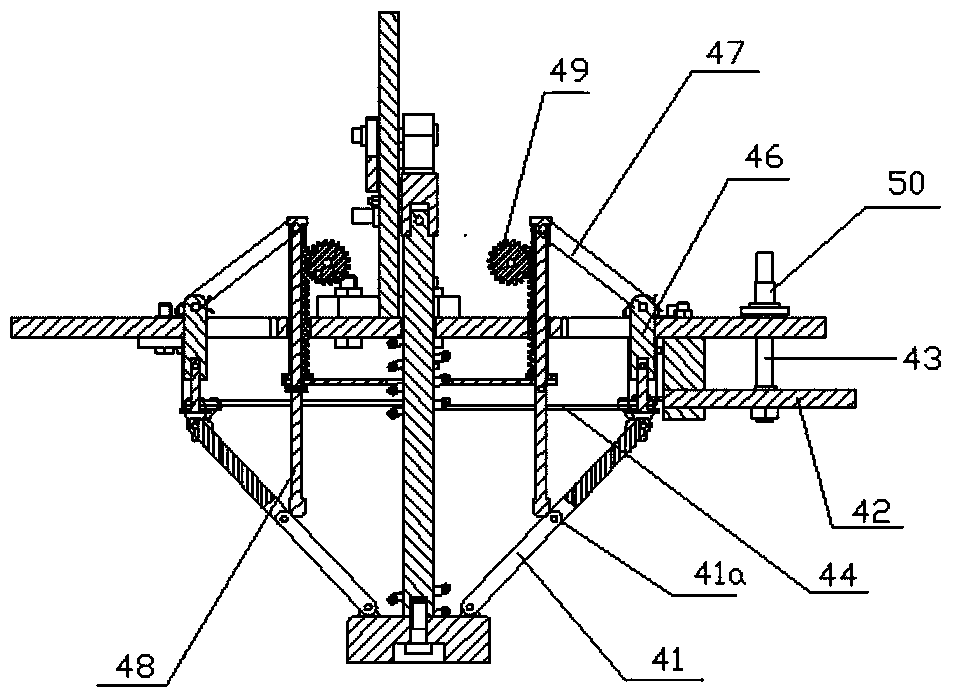
[0031] The jumping robot based on the tripping energy storage and release mechanism of the present invention mainly includes a power spring 21, a dead point push rod guide sleeve, a dead point push rod 48, a foot spring 15, a pedal 19, a support plate 4, a gear a, and a rack a , gear b, rack b, parallelogram mechanism 44 and so on.
[0032] see Figure 2-9, a jumping robot based on a tripping energy storage and release mechanism, including a horizontal support plate 4, 3-4 support legs are fixed below the support plate 4, and a bouncing leg is provided at the center of the support plate 4, and the bouncing leg includes Pedal 19, the top of the pedal 19 is connected with the spring guide column and the trip lever 18, the spring guide post is covered with a power spring 21, the lower end of the power spring presses the pedal 19, and the upper en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More