

Robot for selecting outer diameter sizes of bearings
A technology of outer diameter size and robot, which is applied in the field of bearing outer diameter size selection robot, can solve the problems of low precision, human error, high labor intensity, etc., and achieve the effects of avoiding slipping, easy detection, and saving manpower and material resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
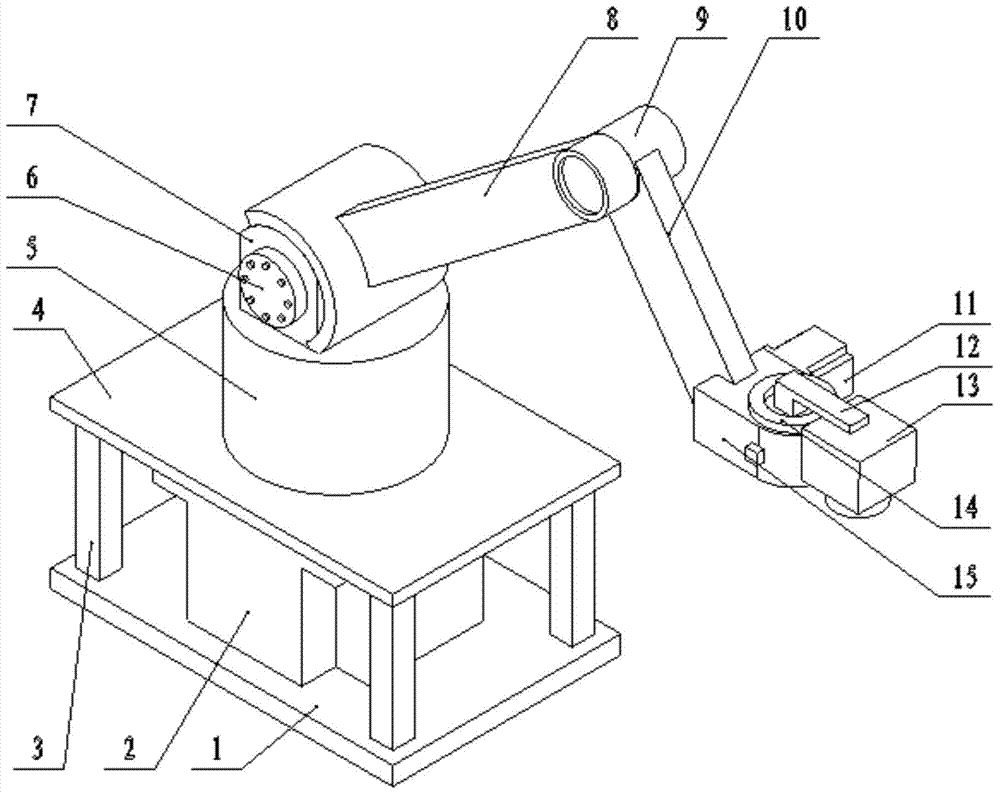
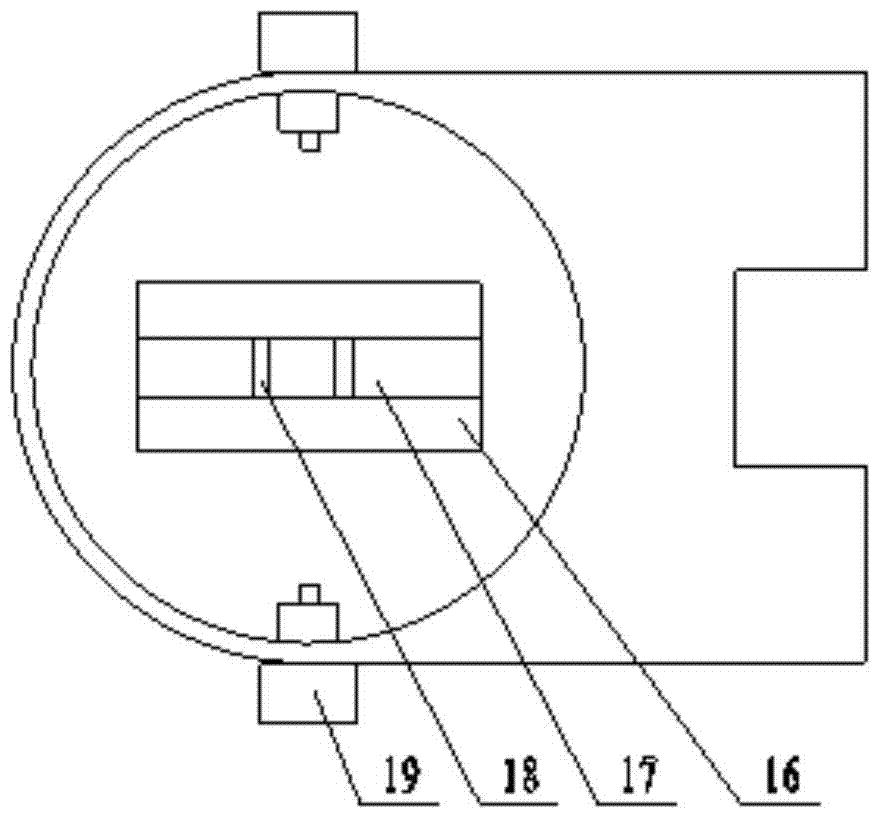
[0012] A robot for selecting the outer diameter of a bearing is composed of a base plate 1, a No. 1 motor 2, a support column 3, a shelf 4, a rotating frame 5, a No. Composed of arm 10, No. 4 motor 11, camera mounting frame 12, CCD camera 13, electromagnet 14, actuator 15, cylinder 16, slide rail 17, catch 18 and distance sensor 19, it is characterized in that: 1 installation on the base plate There is a support column 3, and the support column 3 is connected with a shelf 4, and a No. 1 motor 2 is arranged under the shelf 4, and the No. 1 motor 2 is connected with the rotating frame 5. The rotating frame 5 is provided with a mounting plate 7, and the mounting plate 7 is connected There is No. 2 motor 6, the big arm 8 is connected with the mounting plate 7, the small arm 10 is connected with the big arm 8, the small arm 10 is provided with the No. 3 motor 9, the end of the small arm 10 is connected with an actuator 15, and the actuator 15 is No. 4 motor 11, camera mount 12 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More