

A controllable multi-degree-of-freedom manipulator
A manipulator and degree of freedom technology, applied in the field of robotics, can solve the problems of small working space, low rigidity, and large torque required, and achieve the effect of large working space, high flexibility, and reduced active torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
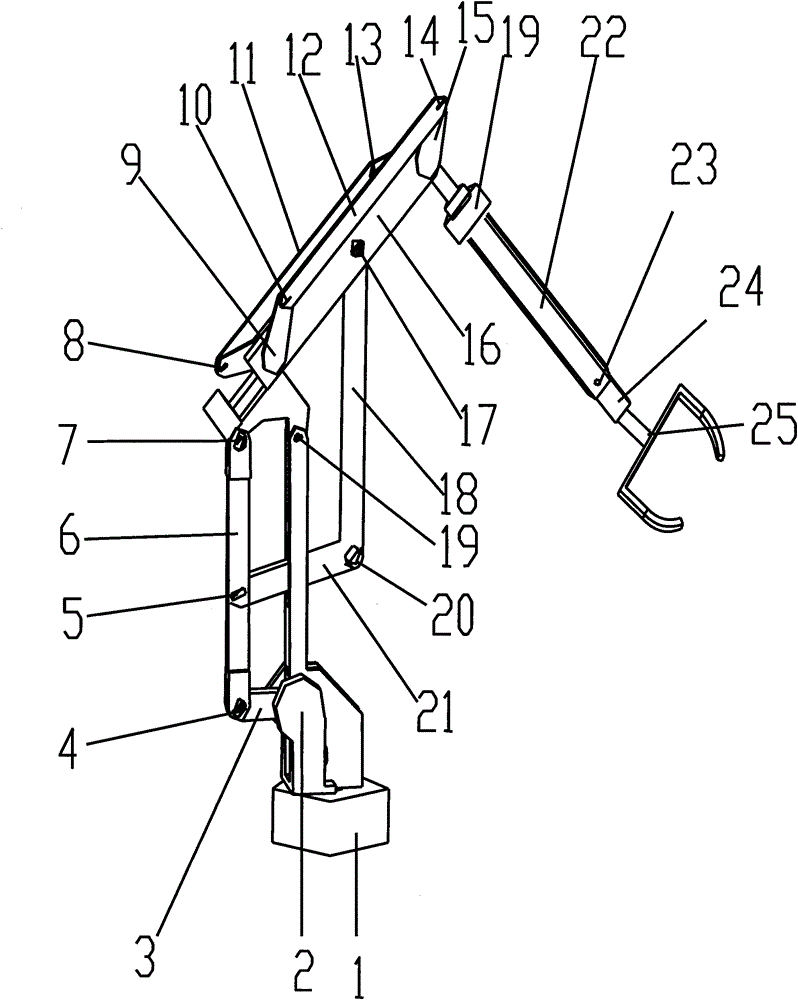
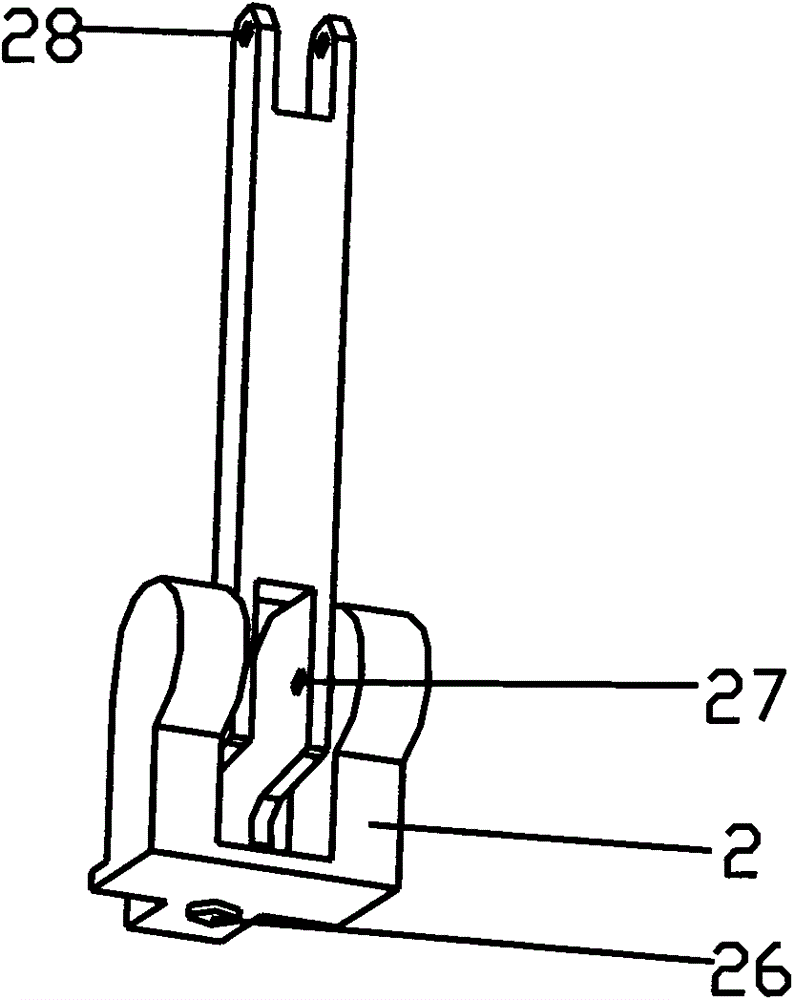
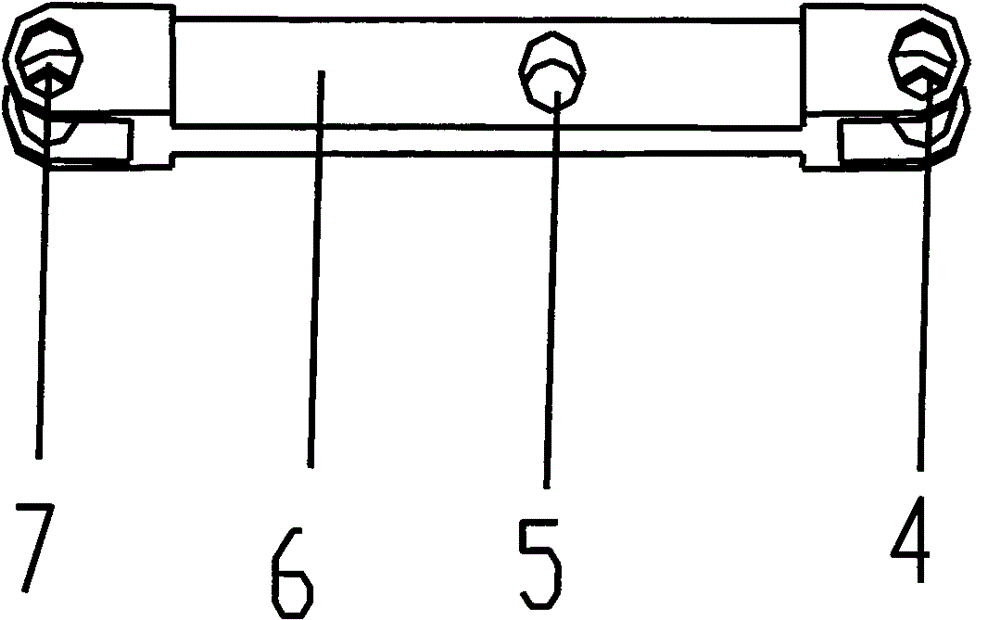
[0028] control figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 and Figure 6 , a controllable multi-degree-of-freedom manipulator, its structure and connection method are:
[0029] The actuator chain is composed of fuselage 2, first connecting rod 3, second connecting rod 6, third connecting rod 21, fourth connecting rod 18, fifth connecting rod 16, sixth connecting rod 9, seventh connecting rod 15. The eighth connecting rod 11, the ninth connecting rod 12, the tenth connecting rod 19, the eleventh connecting rod 22, the twelfth connecting rod 24, the end effector 25 and the frame 1 are connected, and the fuselage 2 A connecting end 26 is connected on the frame 1 through the first rotating pair 26, the fuselage 2 is driven by the first rotating pair 26, the first rotating pair 26 is driven by a motor, and the sec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More