

Method for intelligently adjusting manipulator and grasping force on basis of visual image analysis
A technology of visual images and manipulators, applied in manipulators, manufacturing tools, etc., can solve problems such as employee loss, affect product quality, interfere with normal production, etc., and achieve the effect of precise grasping force and accurate object discrimination rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
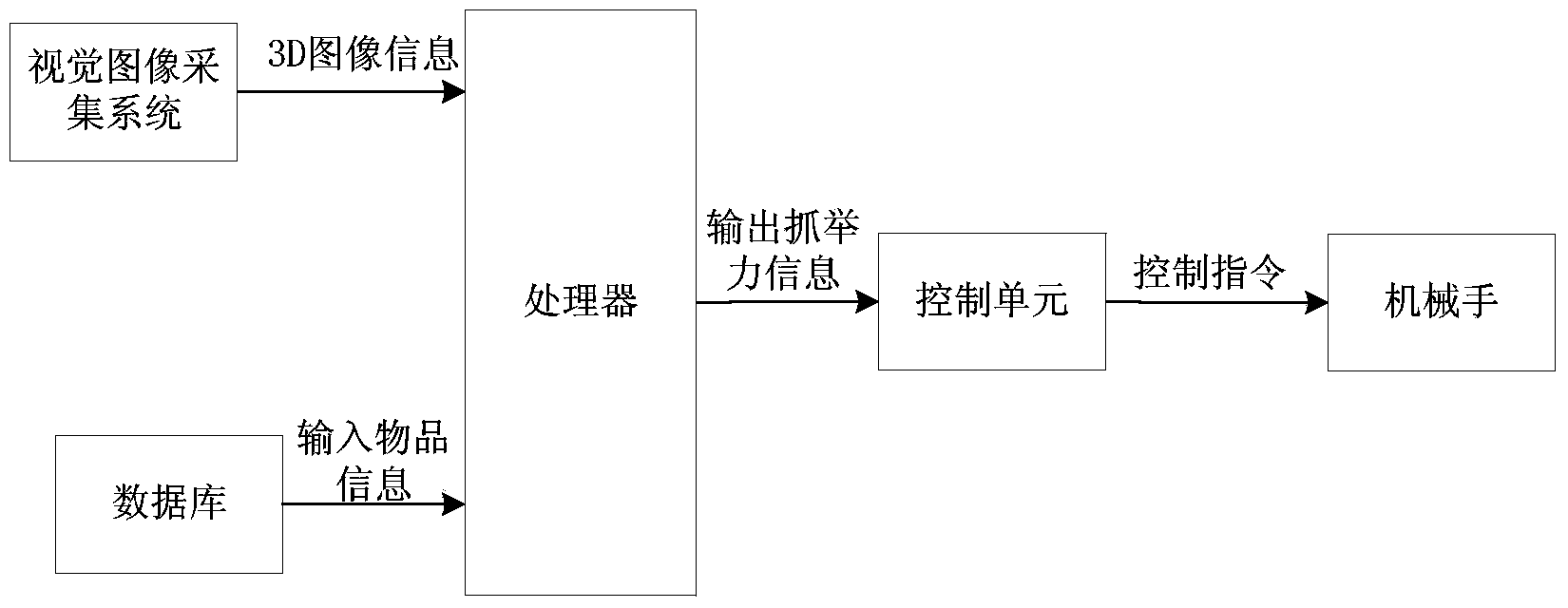
[0032] Taking a water glass as an example, first determine that it is a glass: by comparing the captured image with the existing images in the database, determine the glass water glass; then determine the position of the water, and then determine the size, size and volume of the glass, and calculate The approximate volume of the water is produced, and then the weight of the cup is calculated. According to the information stored in the database, the central processing unit calculates the amount of gripping force required to ensure that the friction force can prevent the cup from slipping when grabbing it. Then through the controller, control the movement of the manipulator and clamp (catch) the smooth glass with a suitable force.
[0033] For some commonly used standard items, such as cigarettes, mineral water, etc., after the judgment is made, the clamping force values established for these items in the database can be directly called.
[0034] Its exterior is scanned by an ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More