

Baud-rate automatic matching method for controller and CAN bus
A CAN bus, automatic matching technology, applied in the direction of program control, computer control, general control system, etc., can solve the problems of limiting the versatility of the controller, reducing work efficiency, and unable to reconfigure the baud rate of the controller, so as to improve the general and portability, to achieve the effect of automatic matching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
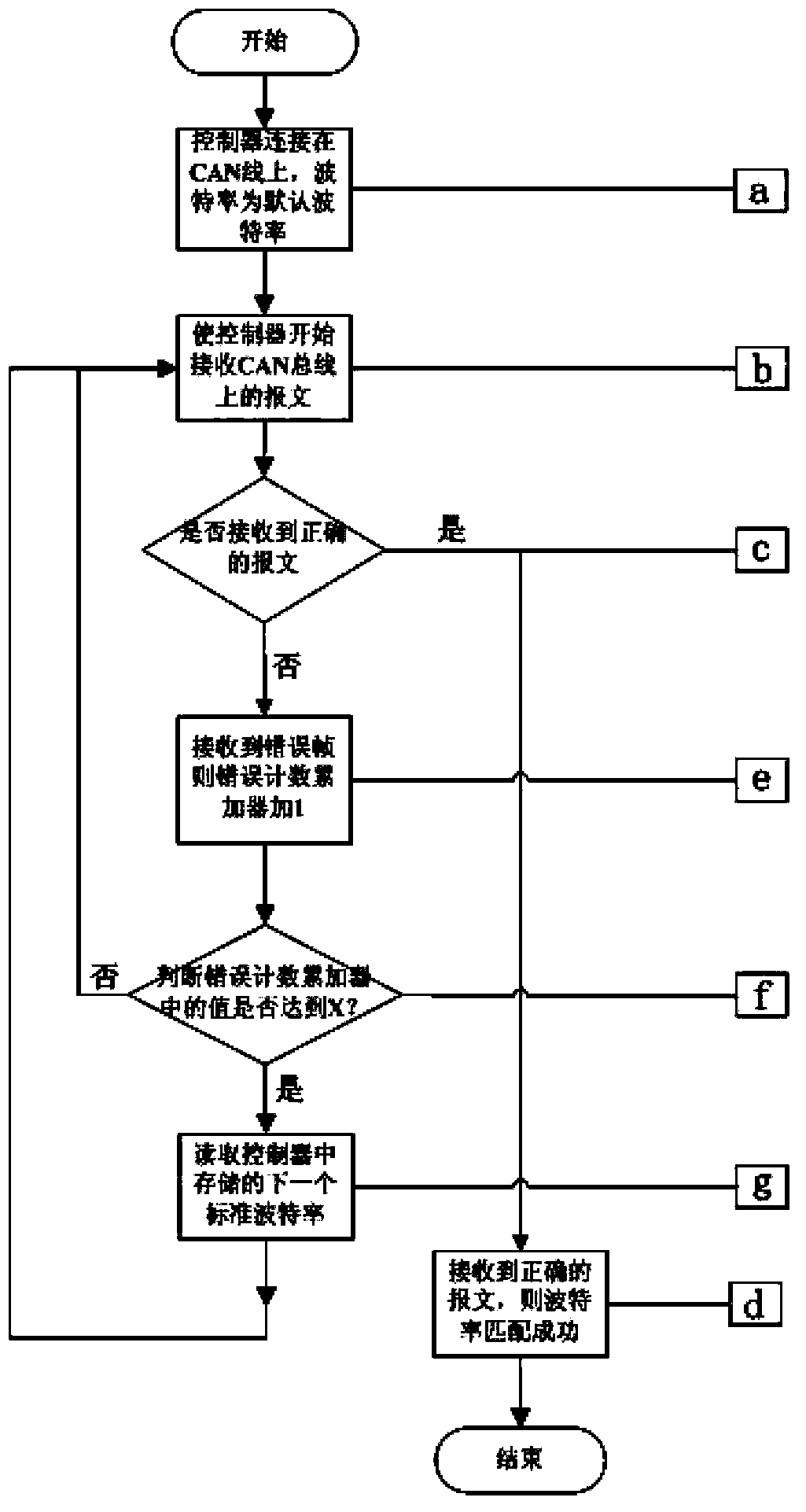
[0026] Assuming that the baud rate of the CAN bus is 500K, the initial value of the error count accumulator is 0, and the predetermined value X=2 of the error count accumulator is specified.
[0027] Step a: Write the controller code, pre-store a variety of standby standard baud rates (1M, 500K, 250K, 125K...) in the microcontroller used by the controller, connect the controller to the CAN bus, and connect the controller The default standard baud rate is set to 1M.
[0028] Perform step b: the controller receives the message sent by the CAN bus;
[0029] Perform step c: Since the default standard baud rate of the controller is 1M and the fixed baud rate of the CAN bus is 500K, it is clear that the message sent by the CAN bus is an error message received by the controller, so go to step e.
[0030] Step e: The controller receives an error message sent by the CAN bus, and the controller receives an error frame, and adds 1 to the value of the error count accumulator built into the contro...
example 2
[0041] Assuming that the baud rate of the CAN bus is 1M, the initial value of the error count accumulator is 0, and X=2 is specified.
[0042] Step a: Write the controller code, pre-store various standby standard baud rates (1M, 500K, 250K, 125K...) in the microcontroller used by the controller, connect the controller to the CAN bus, and connect the controller The default standard baud rate is set to 1M.
[0043] Perform step b: the controller receives the message sent by the CAN bus.
[0044] Perform step c: Determine whether the controller receives the correct message. Since the default initial baud rate of the controller is 1M and the fixed baud rate of the CAN bus is 1M, it is obvious that the controller receives the message sent by the CAN bus. For the correct message, go to step d.
[0045] Perform step d: The controller receives the correct message sent by the CAN bus, which means that the baud rate of the controller and the CAN bus is the same, and the baud rate is matched su...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More