

Pneumatic adjustable clamping plate type mechanical gripper for stacking robot
A palletizing robot and manipulator technology, applied in the field of packaging and transfer, can solve the problems of slow clamping action, low reliability, weight limitation, etc., and achieve the effect of improving transfer efficiency, high transfer efficiency and high reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
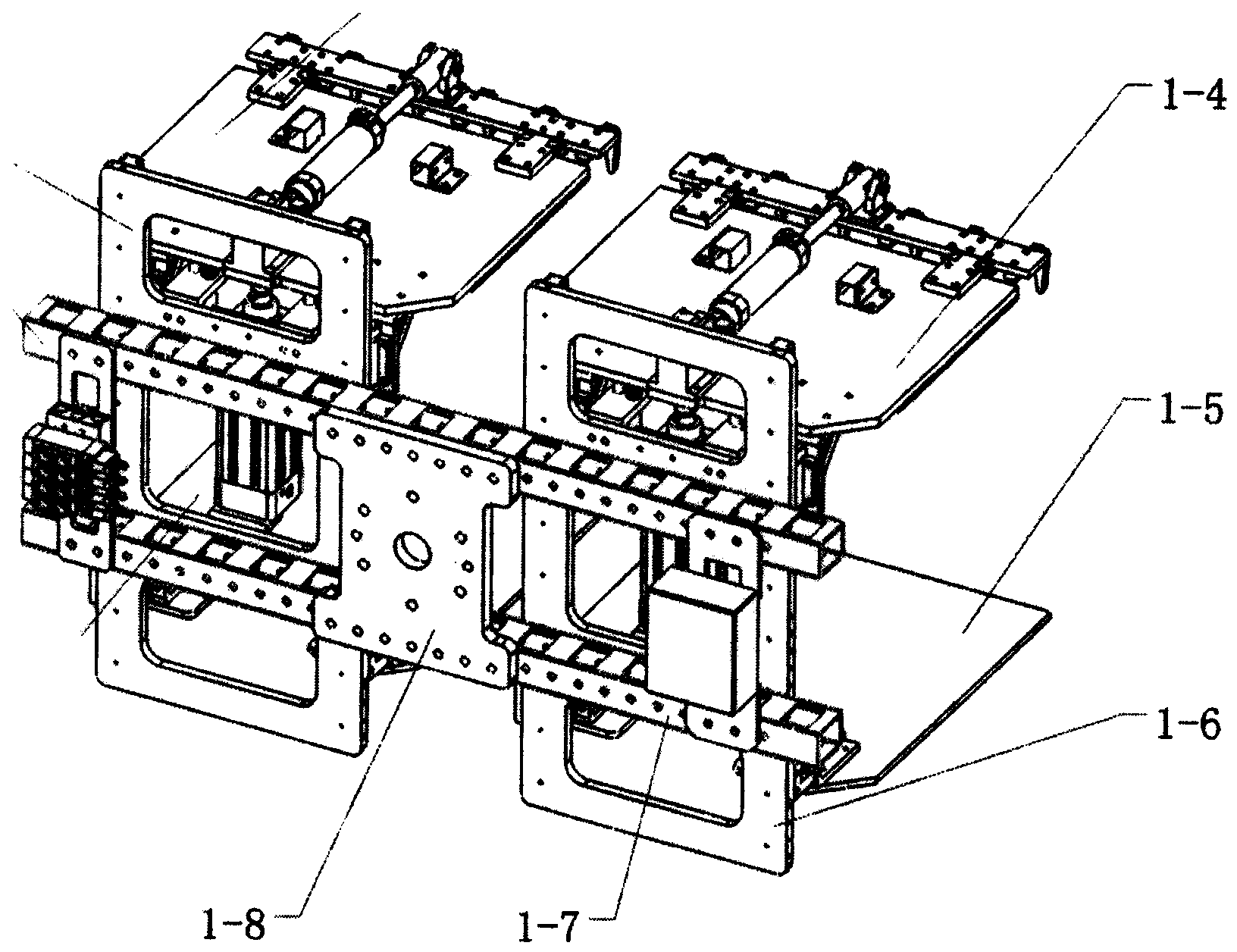
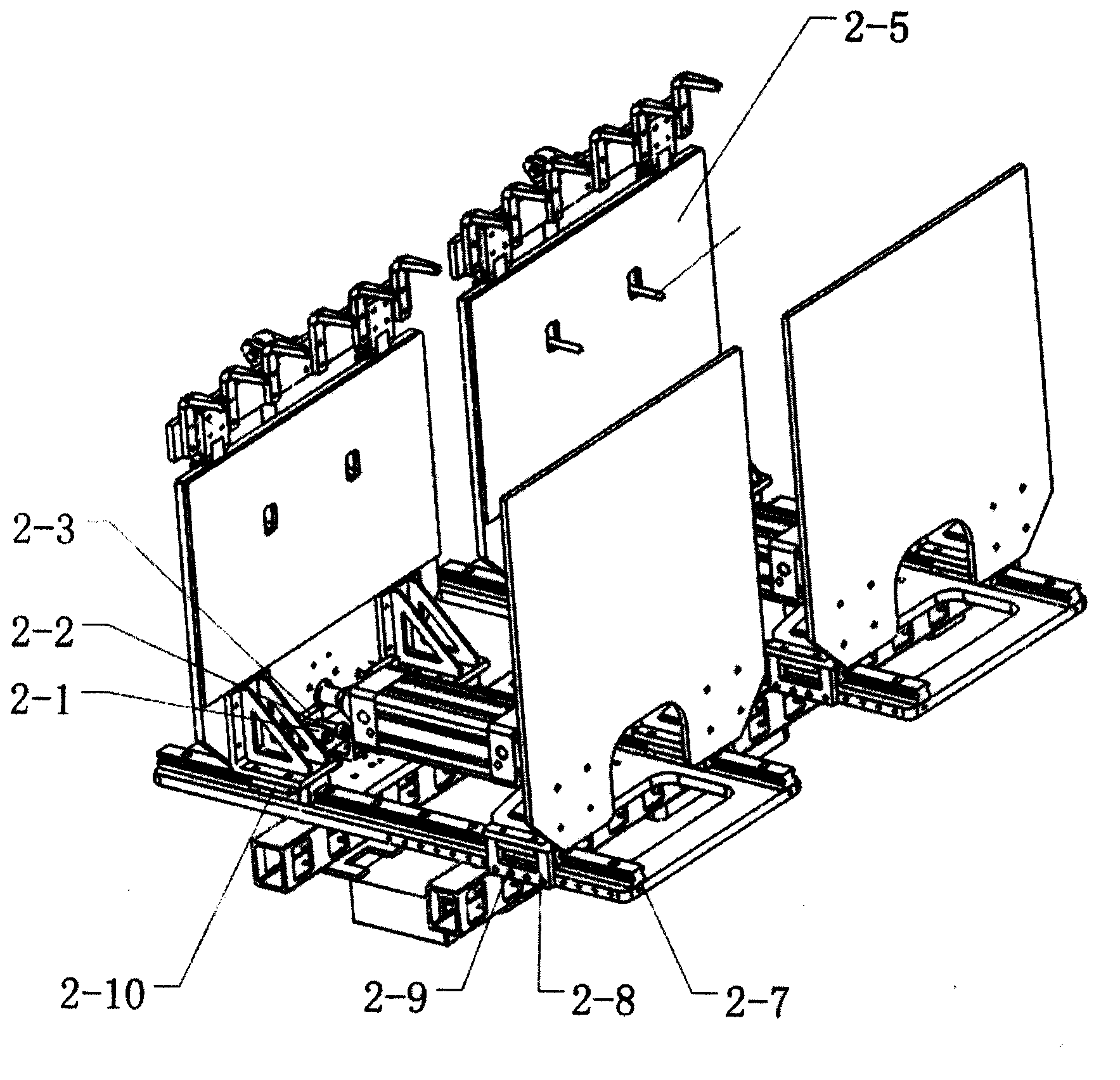
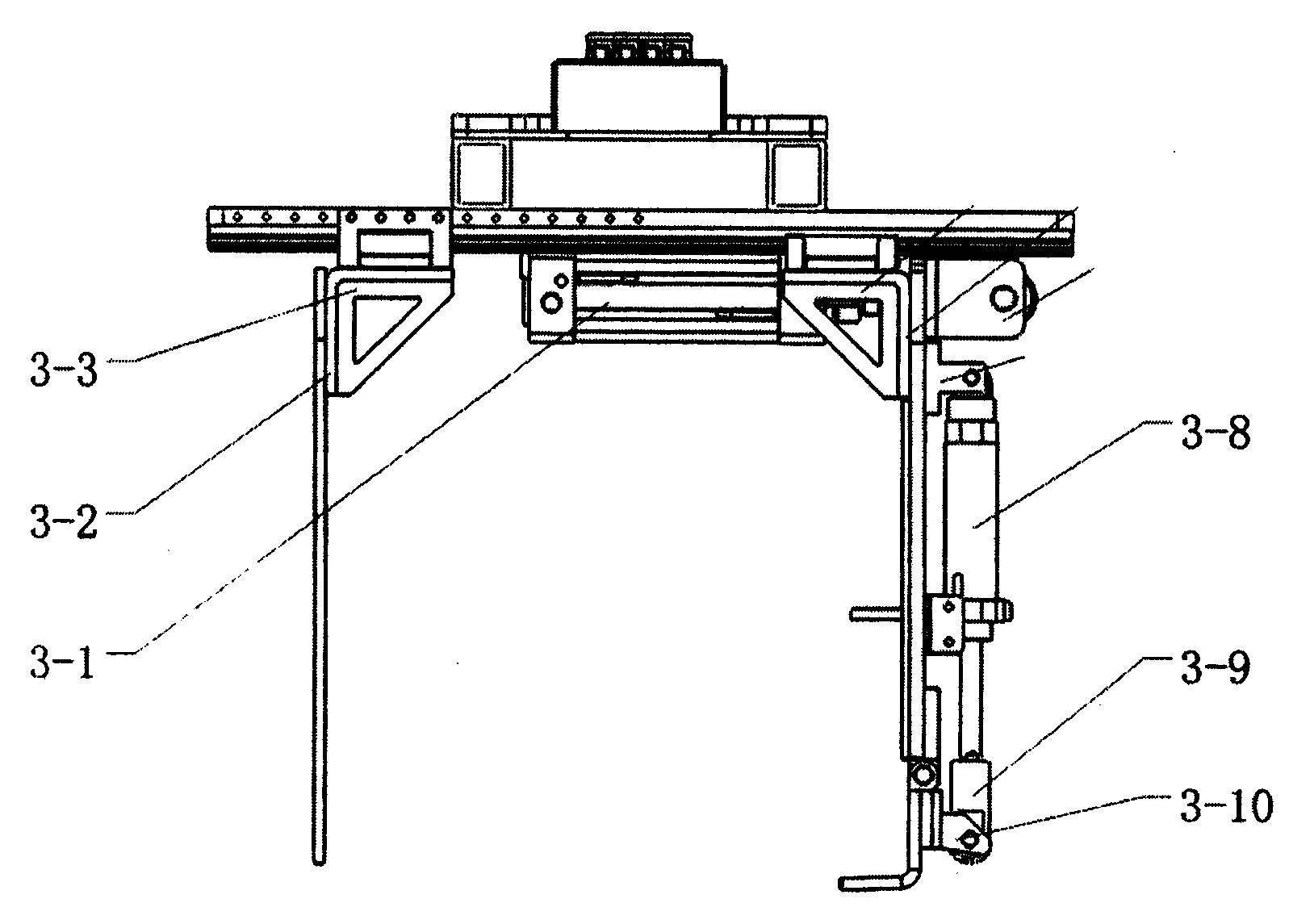
[0029] like Figure 1 to Figure 3 As shown, a pneumatically adjustable splint-type mechanical gripper for palletizing robots includes a connecting frame 1-7, and the connecting frame 1-7 is connected to the Mado robot through a connecting flange 1-8, and the connecting The frame 1-7 is provided with at least one set of mounting plates 1-6, the mounting plate 1-6 is provided with a linear slide rail 2-7, and the linear slide rail 2-7 is provided with a first slider 2- 10. The first slider 2-10 is provided with a clamping plate 1-4, and the mounting plate 1-6 is provided with a fixing plate 1-5 parallel to the clamping plate 1-4, so The mounting plate 1-6 is also provided ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More