

Robot positioning system and reflection device identification method thereof
A robot positioning and reflection device technology, which is applied to measuring devices, radio wave measuring systems, instruments, etc., can solve the problems of complicated program design and aggravated processing chip burden, and achieve the effect of reducing computing burden and positioning error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings.
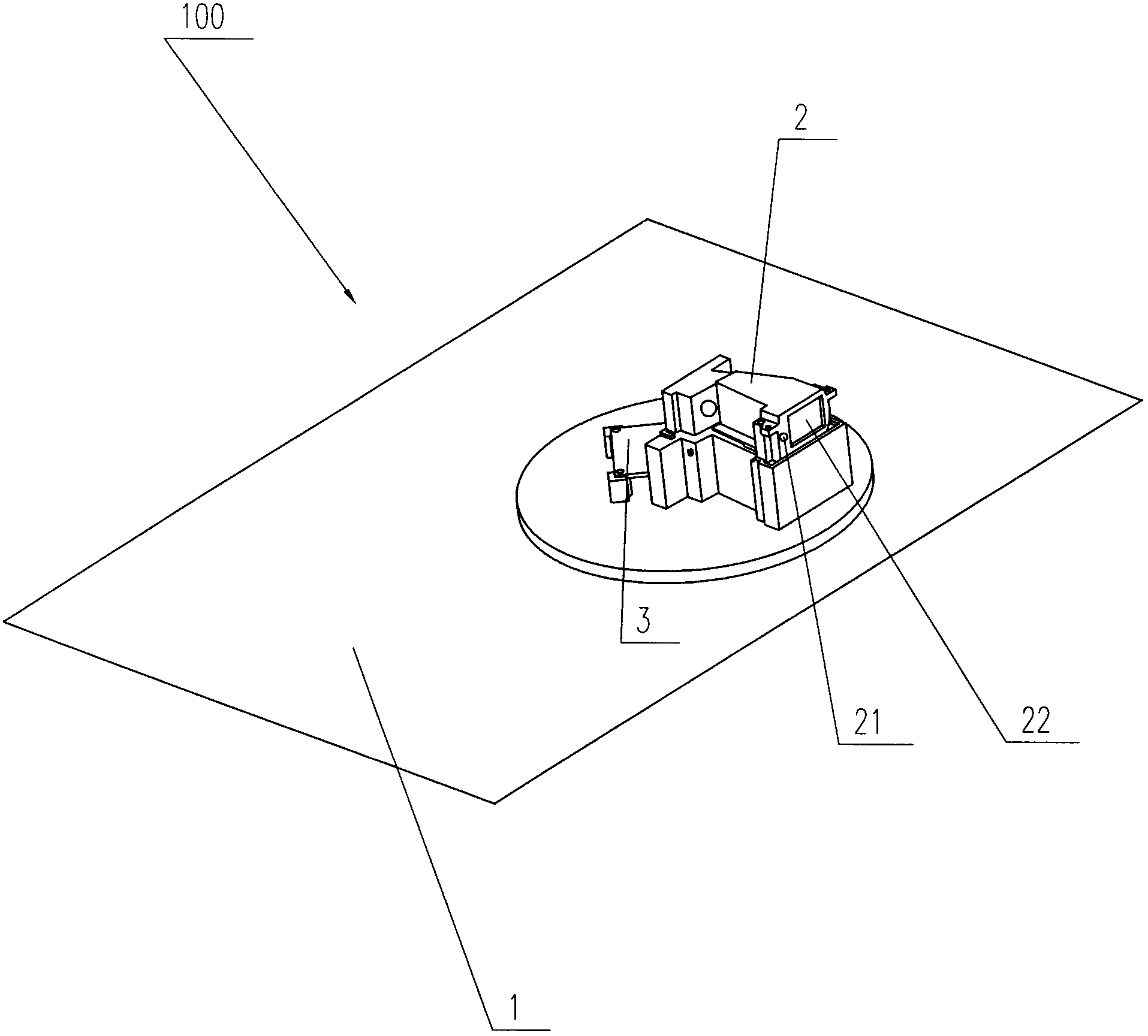
[0021] The robot positioning system of this embodiment includes a movable automatic mowing robot, which can automatically mow the lawn. Such as figure 1 As shown, the mowing robot 100 includes a signal system for sending and receiving signals, a processing system for calculating and judging, and a walking system for moving the robot. The robot 100 includes a car body 1, and the car body 1 has wheels or crawlers (not shown in the figure) ), enabling the robot to move on the ground. The car body 1 is provided with a signal system 2, which includes a laser emitting device 21 and a laser receiving device 22. The laser emitting device 21 can rotate at a certain speed around an axis perpendicular to the car body at a horizontal direction of 360°, so that the laser light can be continuously obtained. Sweep around the car body, and the laser that the launcher 21 sends can al...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More