

Large free-form surface robot polishing system
A robot and industrial robot technology, applied in the direction of grinding machines, grinding racks, grinding beds, etc., can solve the environment where there is no perfect robot intelligent grinding system solution, grinding pressure and grinding path are difficult to maintain uniformity, and grinding and polishing environment Bad problems, to achieve the effect of ensuring the consistency of grinding quality, ensuring the amount of grinding removal, and realizing real-time communication
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
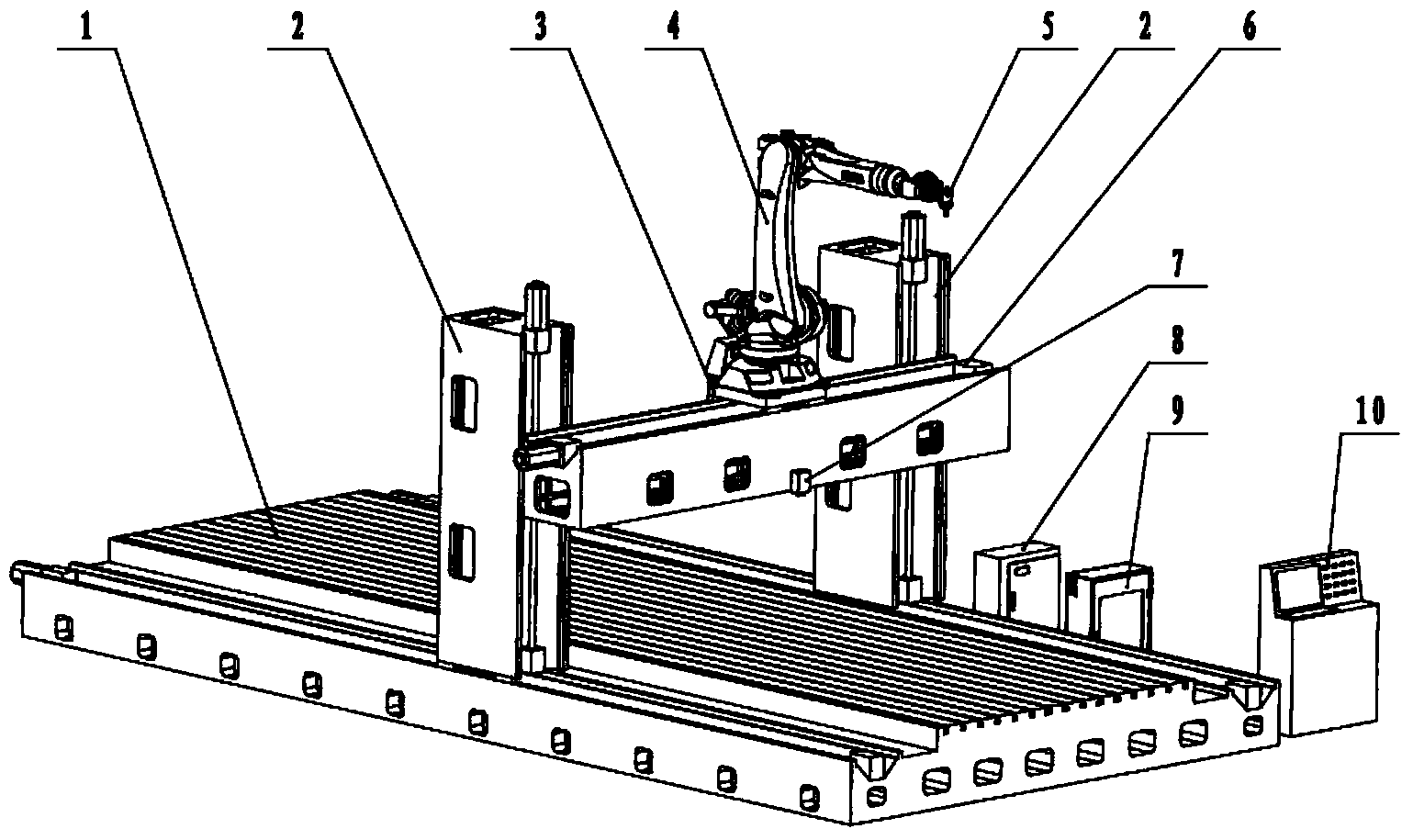
[0022] The invention proposes a large-scale free-form surface robot grinding system, which can realize grinding of large-scale free-form surface parts or batch grinding of multiple parts of the same type by integrating industrial robots, mobile gantry frames and pneumatic grinding heads. Effectively improve production efficiency.
[0023] figure 1 It is a schematic structural diagram of a grinding system according to an embodiment of the present invention, such as figure 1 As shown, according to an embodiment of the present invention, the large-scale free-form surface robot grinding system includes a mobile gantry, an industrial robot 4, a pneumatic grinding head 5, a vision system, a robot control cabinet 8, a pneumatic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More