

A robot parallel grinding system
A technology of robots and industrial robots, which is applied in the direction of grinding machines, grinding drive devices, and parts of grinding machine tools, can solve problems such as unsatisfactory grinding effects, threats to the health of workers, and difficulty in controlling the grinding quality. Grinding removal volume, guaranteed grinding accuracy and consistent grinding quality, easy-to-control results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
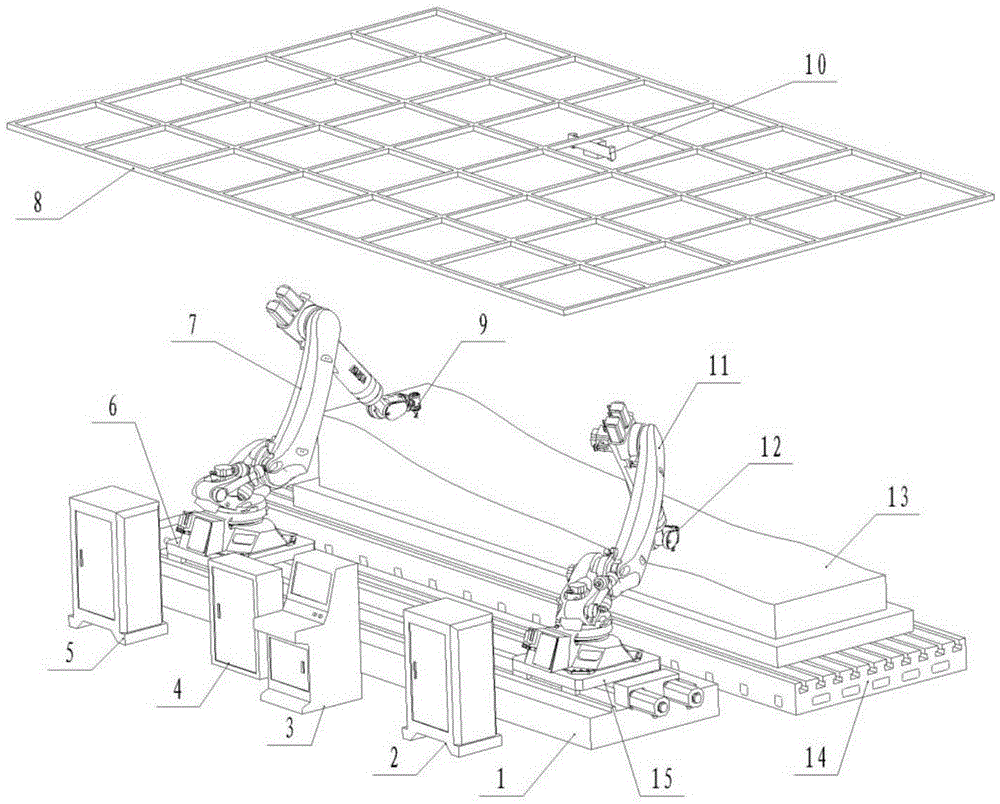
[0024] The invention proposes a parallel grinding system for robots. The grinding system can realize synchronous rough grinding and fine grinding of large free-form surface parts by synchronously controlling two industrial robots, thereby effectively improving production efficiency.
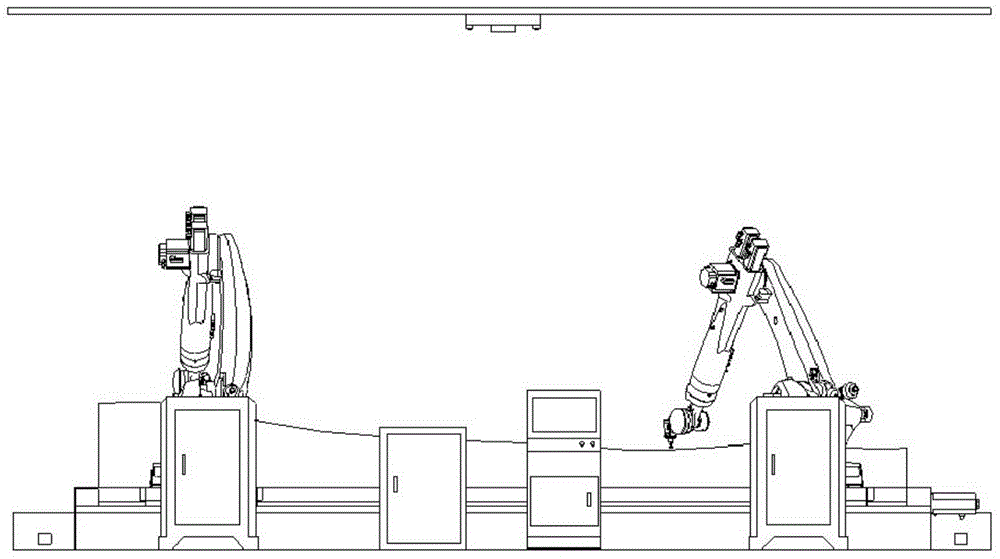
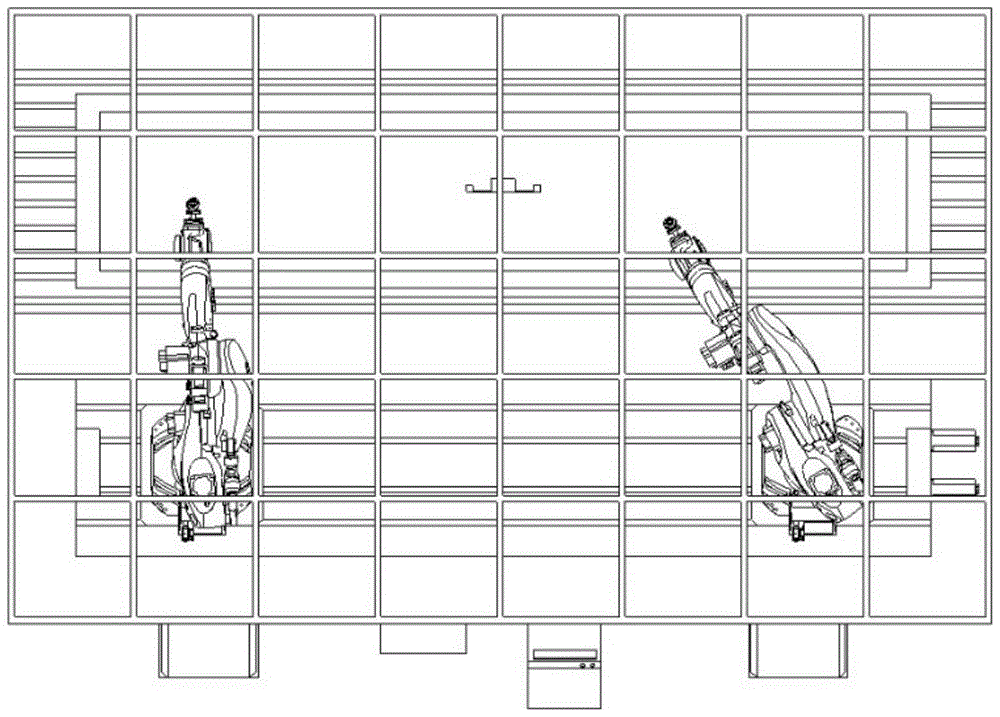
[0025] figure 1 It is a schematic structural diagram of a grinding system according to an embodiment of the present invention, figure 2 It is a front view of a grinding system according to an embodiment of the present invention, image 3 It is a top view of a grinding system according to an embodiment of the present invention, Figure 4 It is a left side view of the grinding system according to an embodiment of the present invention, such...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More