

Single-leg robot jumping mechanism driven through connecting rod
A connecting rod transmission and robot technology, applied in the field of robots, can solve the problems of weak energy storage effect and can only jump in place, and achieve the effects of reducing energy consumption, improving stability and agility, and reducing moment of inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
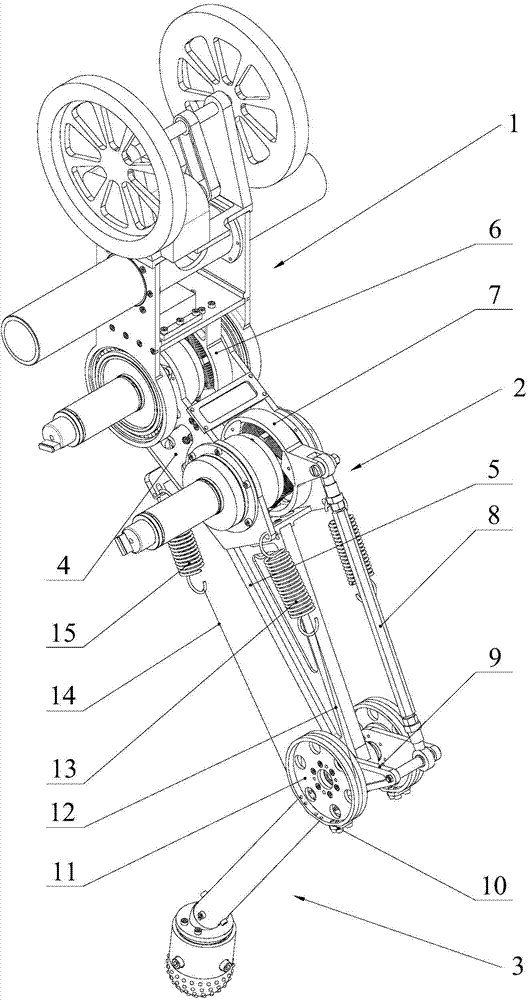
[0045] like Figure 1~4 As shown, a link-driven single-leg robot jumping mechanism includes a fuselage 1, a thigh 2 and a calf 3 that are hinged in sequence. The thigh is provided with a jumping drive device that drives the leg to rotate and a directional drive device that drives the thigh to rotate.
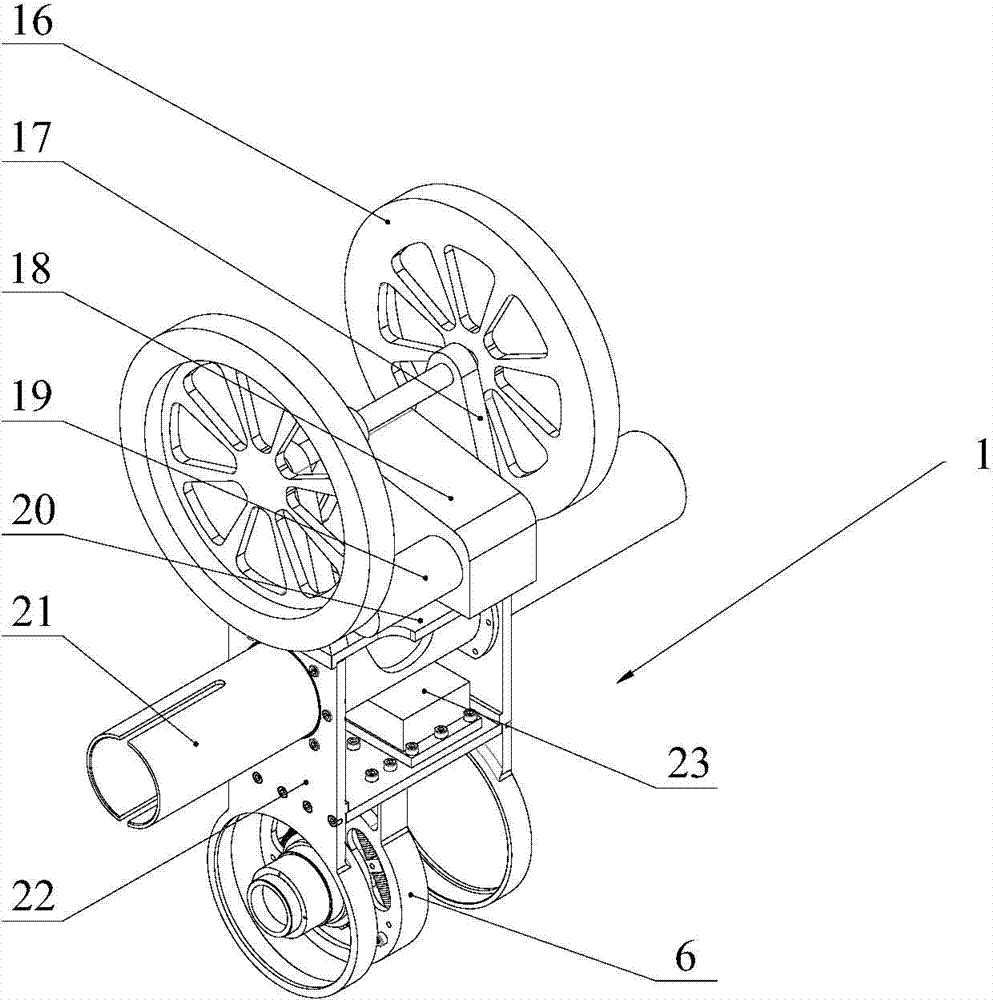
[0046] like figure 2 As shown, the fuselage 1 includes a base 20, a balance flywheel 16 connected to the base and a gyroscope 23 fixed on the base, and a flywheel motor 19 and a flywheel reducer 18 that cooperate with each other are also fixed on the base, The output shaft of the flywheel reducer drives the balance flywheel to rotate through the synchronous belt 17. The base 20 is also provided with two side splints 22 arranged symmetrically. The side splints are fixed as a whole through the clamping tube 21. Each side splint includes an adapter plate hinged with the thigh. The two adapter plates are directly fixed with First series elastic drive 6 .
[0047] like figure 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More