Bionic four-foot robot provided with spinal joint and elastic legs
A quadruped robot and elastic leg technology, applied in the field of bionic robots, can solve the problems of not considering the deformation of system components, complex dynamic shape, unable to well reflect animal motion characteristics, etc., to achieve motion coordination and reduce impact force. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment example 1
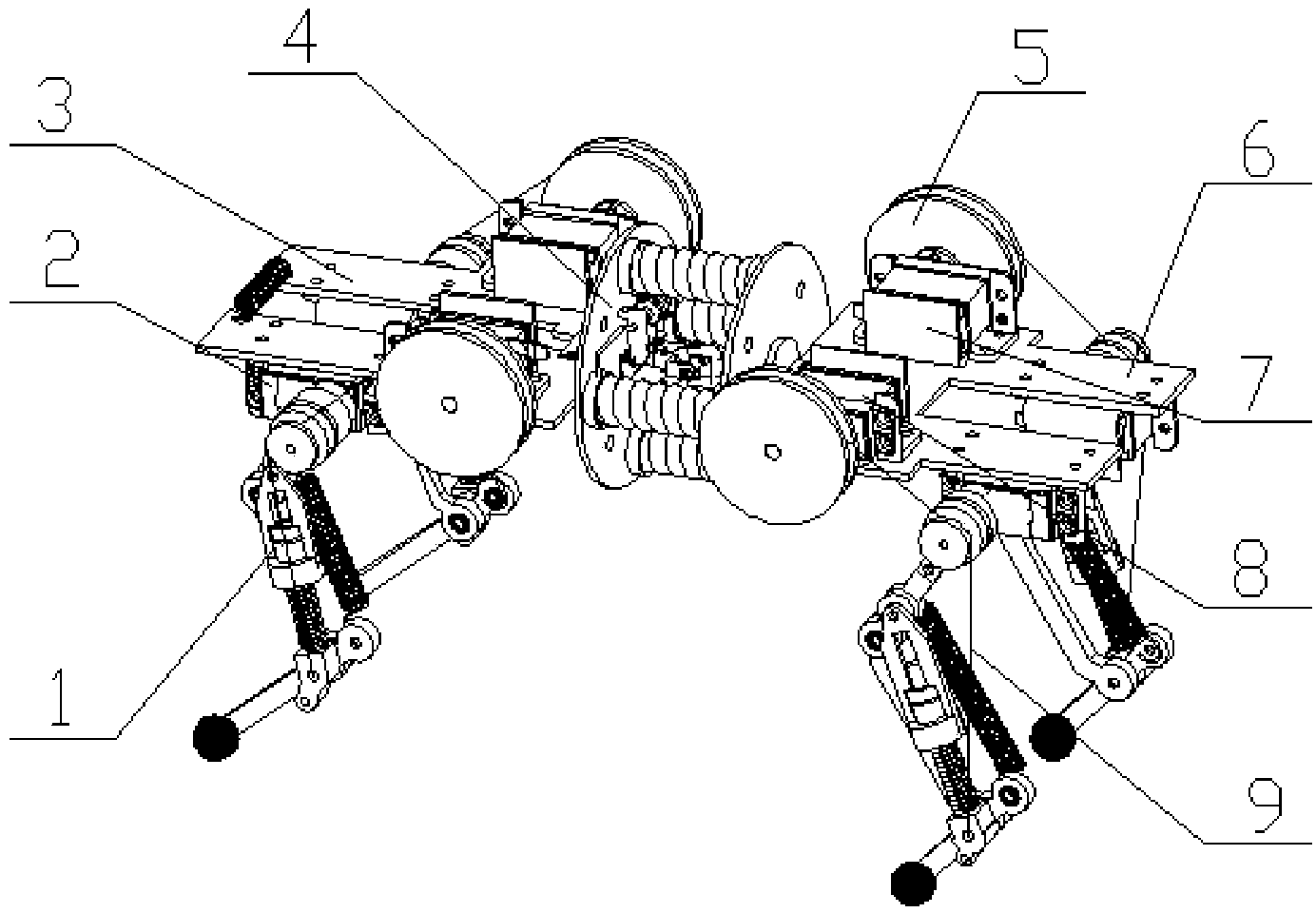
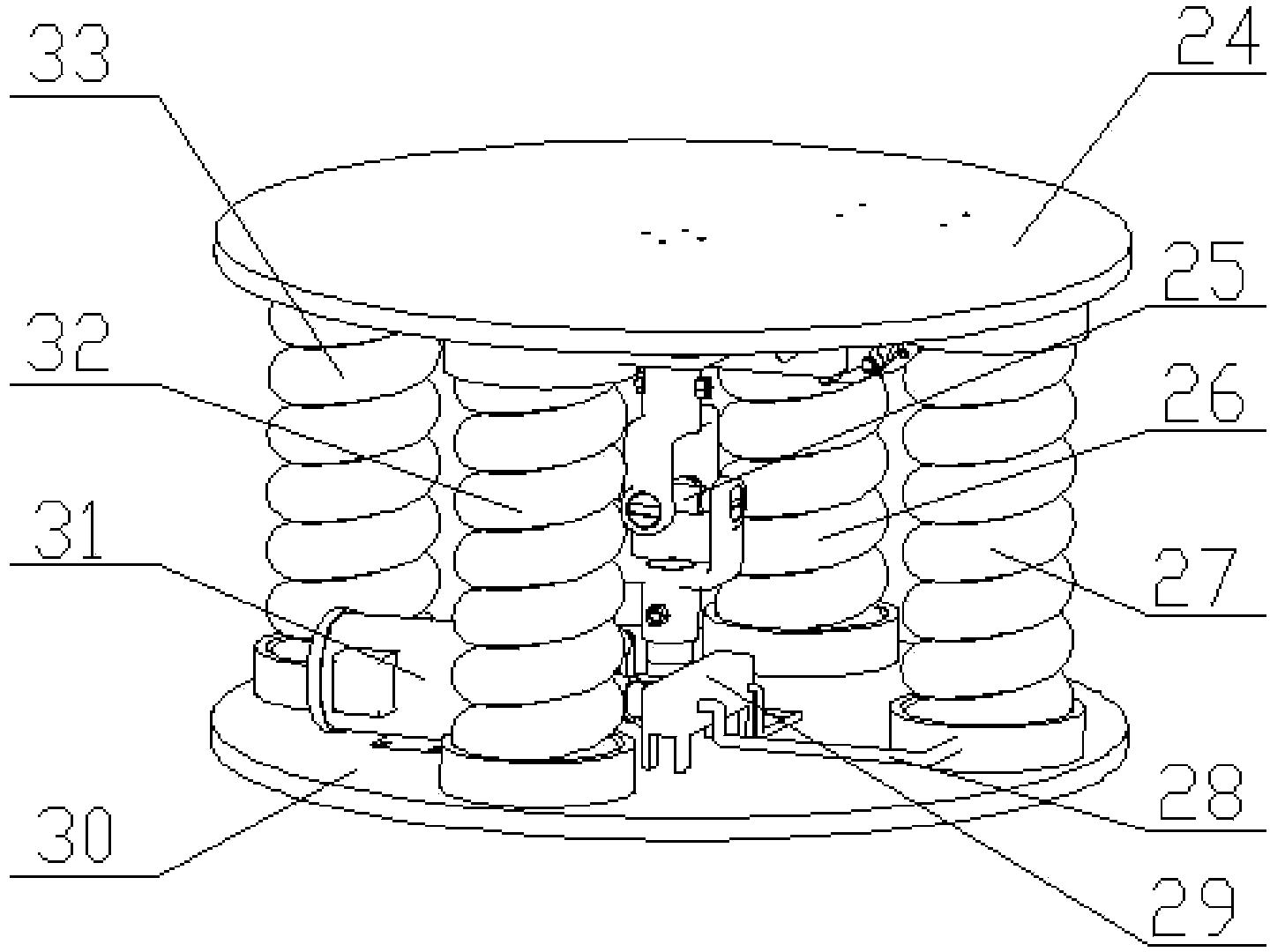
[0019] Implementation Case 1: Combining figure 1 , image 3 and Figure 4 , the present invention has the following several parts to form: elastic leg 1, forefoot trunk 3, spinal joint 4, rear trunk 6, the structure and motion principle of four legs are exactly the same. The pulley steering gear 2 is installed on the front and rear trunks such as figure 1 Below the position shown, its output shaft is connected to one end of the thigh 11 . The reel steering gear 8 is installed on the top of the front and back trunk as shown in the figure, and its output shaft connects the reel 5 . The front trunk 3 and the rear trunk 6 are connected together by spinal joints 4 . The spinal joint 4 is composed of a first end cover 24, a two-degree-of-freedom cross-axis rigid universal joint 25, a first bellows 26, a second bellows 32, a third bellows 27, a fourth bellows 33, hydraulic oil pipes 28, The two-position four-way electromagnetic valve 29, the second end cover 30, and the gear pum...
Embodiment example 2
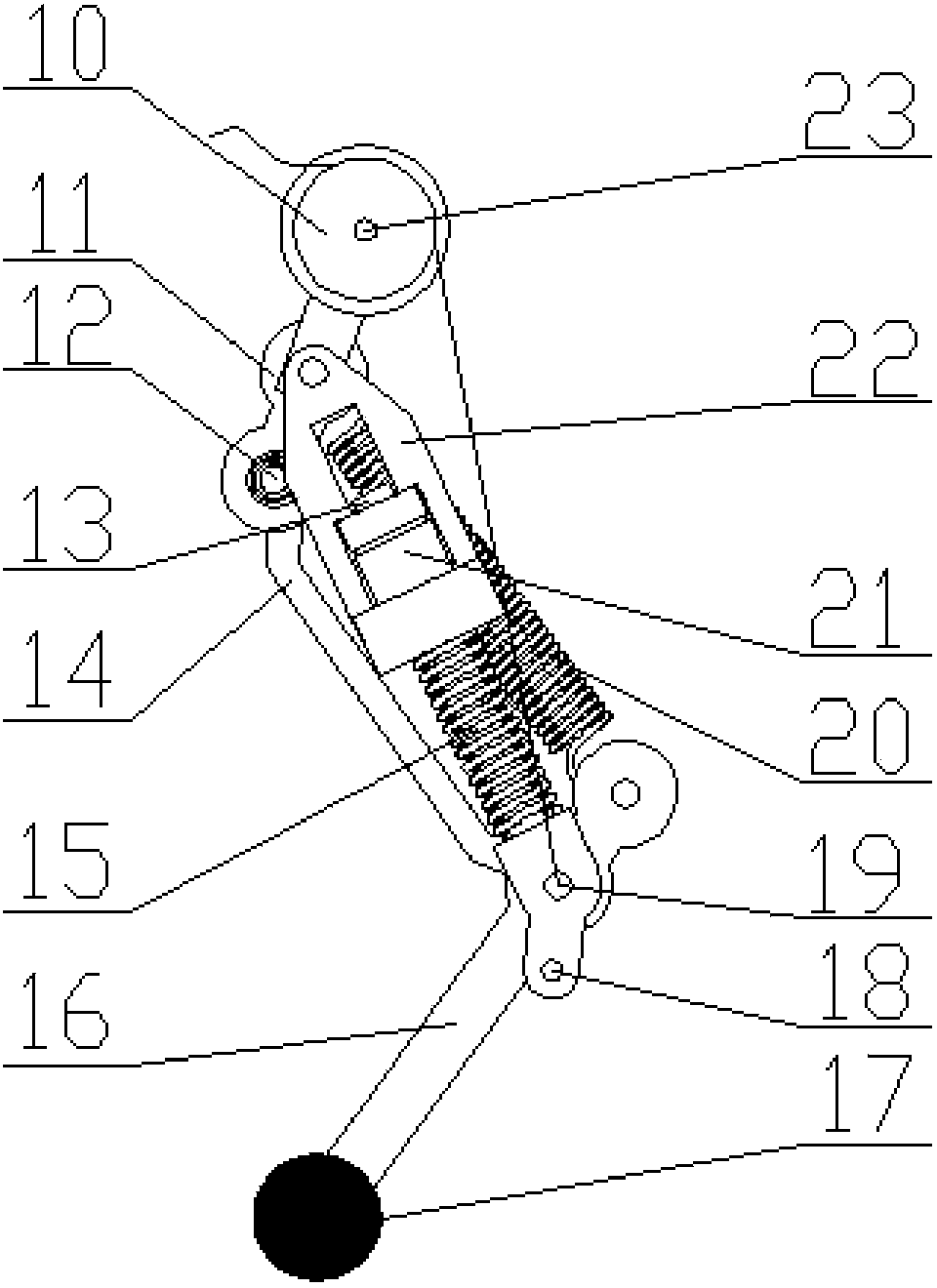
[0022] Implementation Case 2: Combining figure 2 , elastic leg 1 is made of wire rope 9, pulley 10, thigh 11, shank 14, foot 16, spherical foot 17, guide rod 13, linear bearing 21, linear bearing seat 22, stage clip 15, extension spring 20, limit pin 18 composition. One end of the thigh 11 is installed on the output shaft of the pulley steering gear 2, the pulley 10 is installed on the hip joint 23 of the thigh 11, the thigh 11 is connected with the shank 14 to form the knee joint 12, and one end of the shank 14 is connected to 1 / 3rd of the foot 16 One connection forms the ankle joint 19, and one end of the foot 16 is a rubber spherical foot 17. One end of the linear bearing seat 22 is connected to one-third of the thigh 11 through a rotating pair. The linear bearing 21 is installed on the linear bearing seat 22 through interference fit. One end of the guide rod 13 is sleeved in the linear bearing 21. The guide rod 13 The other end is connected with the foot 16 at the ankle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com