Real-time grabbing method of virtual hand based on data glove and physical engine
A data glove and physics engine technology, applied in the field of virtual reality, can solve problems such as inaccurate capture process, unsmooth operation, and unsatisfactory real-time performance, and achieve the effect of solving poor real-time performance and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
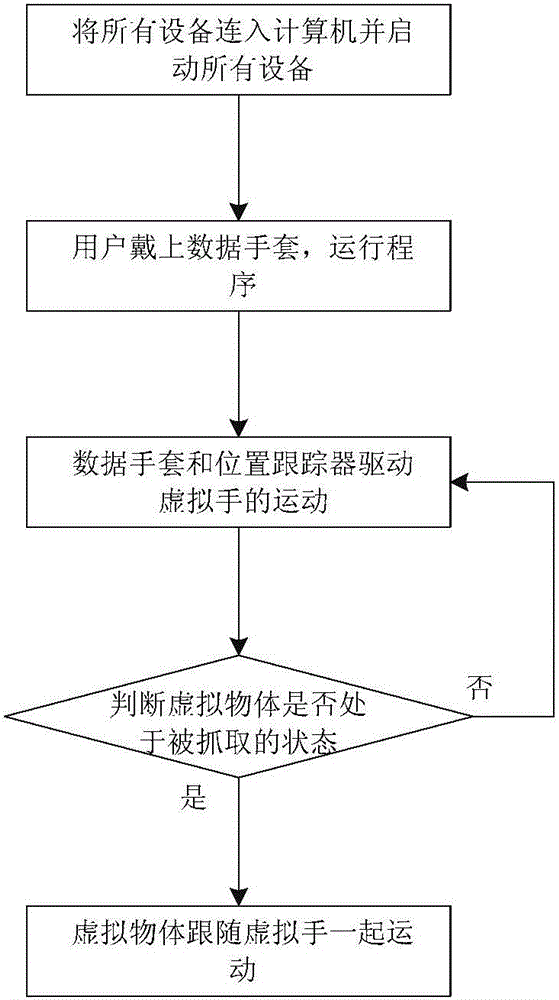
[0037] See figure 2 , in the inventive method, the specific steps of the operating method of system operation are as follows:
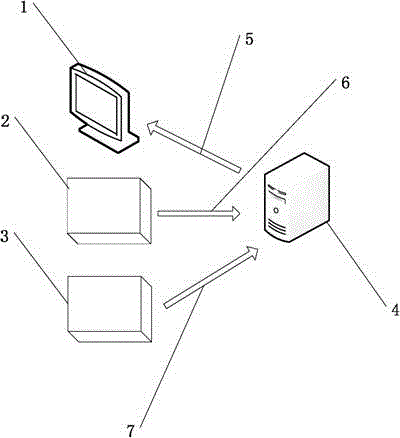
[0038] Step 1: Connect the data glove 3 and the position tracker 2 to the computer through the USB interface and the serial port, and start all the devices in the system, including the computer, the data glove 3 and the position tracker 2.
[0039] Step 2: The user puts on the data glove 3 and runs a program on the computer based on the data glove and a virtual hand grasping method of the physical engine in real time. The program will automatically connect the data glove 3 and the position tracker 2, and obtain data in real time Data sent from Glove 3 and Position Tracker 2.
[0040] Step 3: The user wears the data glove 3 and performs a series of actions, including: finger bending, translation and rotation of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More