

Object grabbing method and device based on 3D matching and computing equipment
An object, 3D technology, applied in the computer field, can solve problems such as affecting industrial automation, inaccurate determination, robot grasping errors, etc., to achieve the effect of improving the object grasping accuracy and optimizing the object grasping method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026]An exemplary embodiment of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although the exemplary embodiments of the present disclosure are shown in the drawings, it is understood that the present disclosure can be implemented in various forms and should not be restricted herein. Instead, it is provided to provide more thoroughly understood the present disclosure, and can communicate the scope of the disclosure to those skilled in the art.
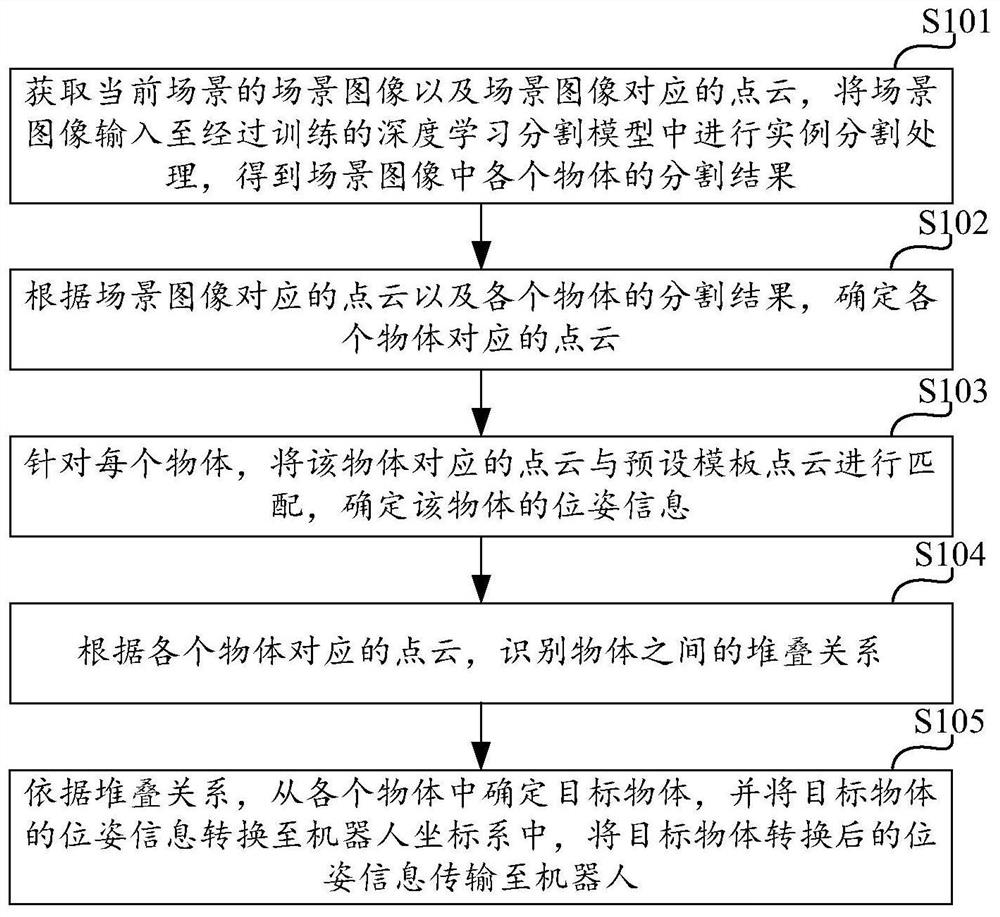
[0027]figure 1 A flow schematic of a 3D matching object grab method is shown in accordance with an embodiment of the present invention, such asfigure 1 As shown, the method includes the following steps:
[0028]Step S101, acquire the scene image of the current scene and the point cloud corresponding to the scene image, and input the scene image to the training-trained depth learning segmentation model to obtain an instance segmentation process to obtain the segmentation results of the in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More