

Three-dimensional pose estimation method of deformed object and positioning grabbing system
A technology of three-dimensional pose and deformation, applied in computing, image data processing, instruments, etc., can solve problems such as difficult to guarantee retention
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
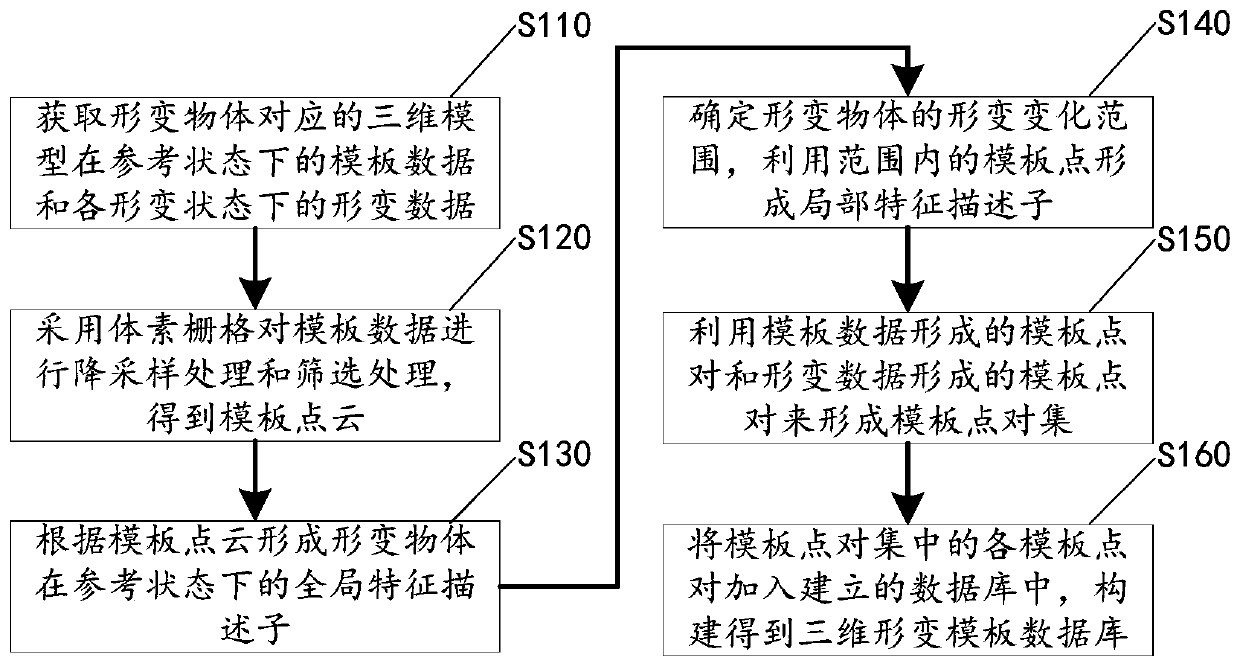
[0046] Please refer to figure 1 , the present application discloses a method for establishing a 3D deformable template database, where the 3D deformable template database is used for 3D pose estimation of deformable objects, and the establishing method includes steps S110-S160, which will be described separately below.
[0047] Step S110, acquiring the template data of the 3D model corresponding to the deformable object in the reference state, and the deformation data in each deformation state.
[0048] It should be noted that the reference state of the deformable object may be a state in which the surface of the object is not deformed in the original situation, and the deformed state is a state other than the reference state. For the 3D model of the deformable object, the template information or deformation data of the 3D model can be obtained in various ways, such as directly importing the modeling model of the deformable object (such as a CAD model, ProE model), so as to ob...
Embodiment 2
[0080] Please refer to Figure 5 , on the basis of the 3D deformable template database disclosed in Embodiment 1, the present application discloses a method for estimating a 3D pose of a deformed object, which includes steps S210-S240, which will be described separately below.
[0081] Step S210, obtain the three-dimensional scene data of the deformable object in any deformation state, and construct the scene point pair set of the deformable object according to the scene data; the scene point pair set here includes a plurality of scene point pairs, and the scene point pair consists of Any two scene points form.
[0082] In a specific embodiment, after obtaining the three-dimensional scene data of the deformable object in any deformation state, the scene point pair set of the deformable object is established through the following specific steps:
[0083] (1) According to the preset sampling interval, the point cloud data formed by the scene data is discretized and sampled to f...
Embodiment 3
[0130] Please refer to Figure 11 , the present application discloses a positioning and grabbing system for deformable objects, which includes a sensor 31 , a processor 32 , a controller 33 and a motion mechanism 34 .
[0131] The sensor 31 is used to collect images of the deformable object to form three-dimensional scene data of the deformable object in the current deformation state. The sensors 31 here may be some visual sensors with image acquisition functions, such as camera equipment and laser scanning equipment. The deformable object here can be a product on an industrial assembly line, a mechanical part in an object box, a tool on an operating table, etc. It does not have to be a rigid non-deformable object, but can be an object with slight deformation characteristics, without specific limitation.
[0132] The processor 32 is connected to the sensor 31, and is used to obtain the pose information of the deformed object through the three-dimensional pose estimation metho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More