An online offset correction method and device for robot hand-eye calibration
A hand-eye calibration and robot technology, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of hand-eye calibration offset, base coordinate system deflection, and reduce the accuracy of robot hand-eye calibration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
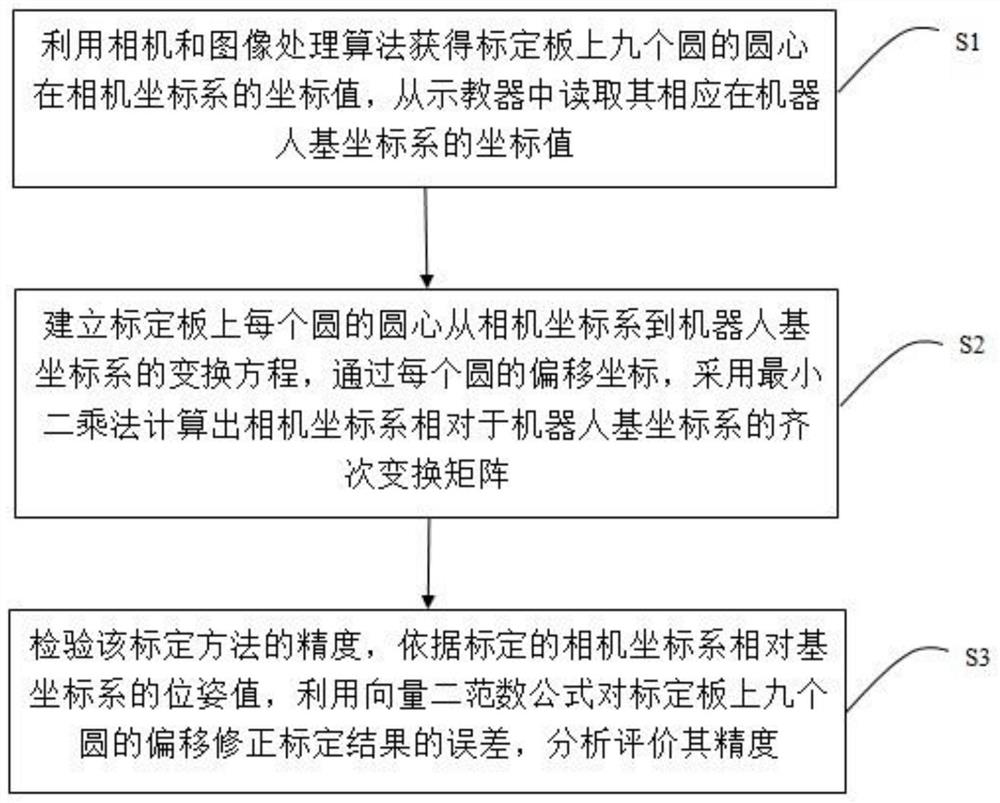
[0034] Such as figure 1 As shown in Fig. 1, an online offset correction method for robot hand-eye calibration includes three stages: data acquisition, offset correction, and precision inspection. details as follows:
[0035] S1: In the data acquisition stage, obtain the coordinate values of the centers of the nine circles on the calibration board in the camera coordinate system and the base coordinate system, use the camera and image processing algorithms to obtain their coordinate values in the camera coordinate system, and read them from the teaching pendant It corresponds to the coordinate value in the robot base coordinate system.
[0036] S2: In the offset correction stage, establish the transformation eq...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More